Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016 103
Chapter 7
Configure a Cartesian H-bot
About Cartesian H-bots
The H-bot is a special type of Cartesian two-axis gantry robot. This type of
machine has three rails positioned in the form of a letter H. Two motors are
positioned at the end of each leg of the robot. Unlike a standard gantry robot,
neither motor is riding on top of the moving rails. Use these guidelines when
configuring a Cartesian H-bot.
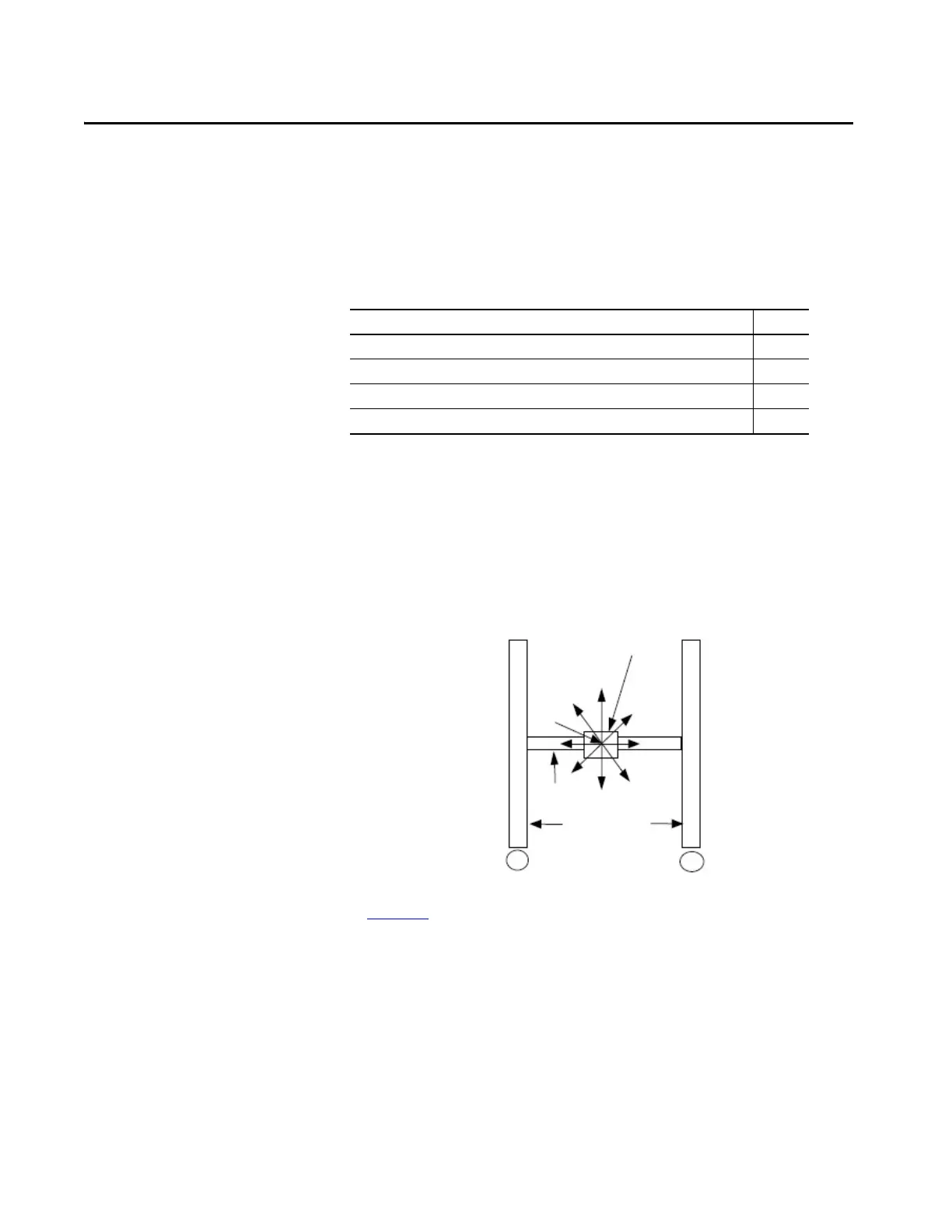
Figure 49 - Cartesian H-bot
In Figure 49, the X1 and X2 axes are the real axes on the robot. X1 Virt and X2
Virt are configured as the virtual axes.
The configuration of the H-bot mechanical linkages enables it to move at a 45
angle to the axes when either motor A or motor B is rotated.
For example, when:
• Motor A (X1 axis) is rotated, the robot moves along a straight line at
+45 angle
• Motor
B (X2 axis) is rotated, the machine moves at an angle of -45.
Topic Page
About Cartesian H-bots 103
Establish the Reference Frame for a Cartesian H-bot 104
Identify the Work Envelope for a Cartesian H-bot 104
Define Configuration Parameters for a Cartesian H-bot 105
X2 Virt
Sliding Member
TCP
Sliding rail
Stationary Rails
Stationary Motors BStationary Motors A
X1
X2
X1 Virt

 Loading...
Loading...





