Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016 43
Configure a Cartesian Coordinate System Chapter 2
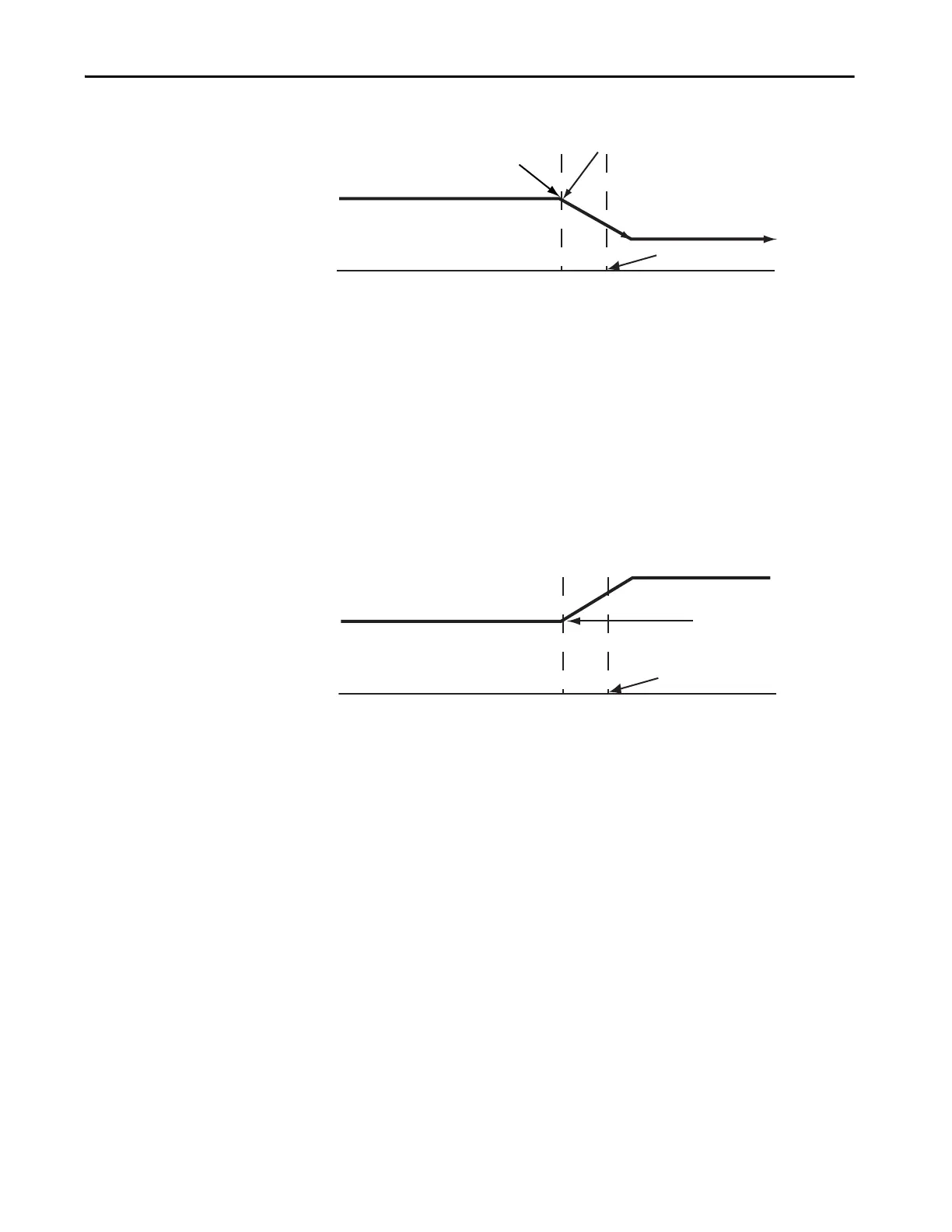
Figure 6 - Velocity Profile of Two Collinear Moves When the Second Move has a Lower Velocity
than the First Move and Termination Type 3, 4, or 5 is Used
This illustration shows a velocity profile of two collinear moves. The second
MCLM instruction has a higher velocity than the first MCLM instruction
and one of these termination types are used:
•No Decel (3)
• Follow Contour Velocity Constrained (4)
• Follow Contour Velocity Unconstrained (5)
The .PC bit is set when the first move reaches its programmed endpoint.
Figure 7 - Velocity Profile of Two Collinear Moves When the Second Move has a Higher Velocity
than the First Move and Termination Type 3, 4, or 5 is Used
Symmetric Profiles
Profile paths are symmetric for all motion profiles.
Programming the velocity, acceleration, and deceleration values symmetrically
in the forward and reverse directions generates the same path from point A to
point C in the forward direction, as from point C to point A in the reverse
direction.
While this concept is most easily shown in a two-instruction sequence, it
applies to instruction sequences of any length if they are programmed
symmetrically.
The .PC Bit is set, MCLM1 is over
.Programmed endpoint of MCLM1
MCLM2
Position
MCLM1
Decel Point
Decel Point
MCLM1
Position
MCLM2
The .PC bit is set, Programmed endpoint
of MCLM1 instruction

 Loading...
Loading...





