50 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 3 Configure Kinematics Coordinate Systems
parameters (link lengths, base offsets, and end-effector offsets) are
configured and the MCT instruction is enabled. For additional
information about the MCT or MCTP instructions, see the
Logix5000™ Controllers Motion Instructions,
publication MOTION-RM002
.
For detailed steps about Creating and Configuring a Coordinate System, see on
Create and Configure a Coordinate System
page 13.
Determine the Coordinate
System Type
Use this table to determine what type of Kinematics coordinate system you
need.
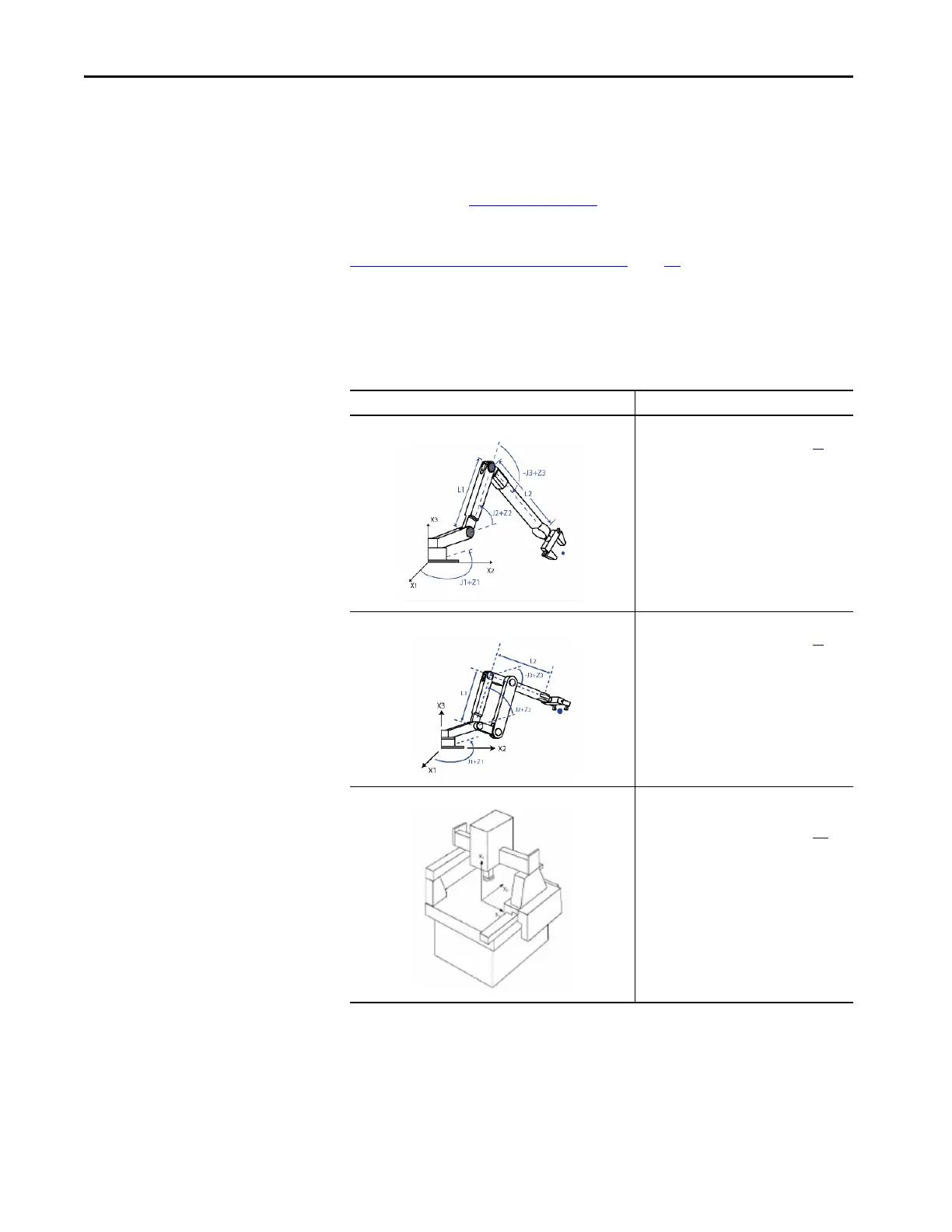
If your robot looks similar to Your Coordinate System type is
Articulated Independent
For configuration information, see page 53.
Articulated Dependent
For configuration information, see page 91
.
Cartesian
This illustration shows a typical Gantry machine.
For configuration information, see page 101
.

 Loading...
Loading...





