60 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 4 Configure an Articulated Independent Robot
Link Lengths
Link lengths are the rigid mechanical bodies attached at joints.
Figure 14 - Example of Link Lengths for an Articulated Independent Robot
For an articulated independent robot with The length
of
Is equal to the value of the distance
between
2 dimensions L1
L2
J1 and J2
J2 and the end-effector
3 dimensions L1
L2
J2 and J3
J3 and the end-effector
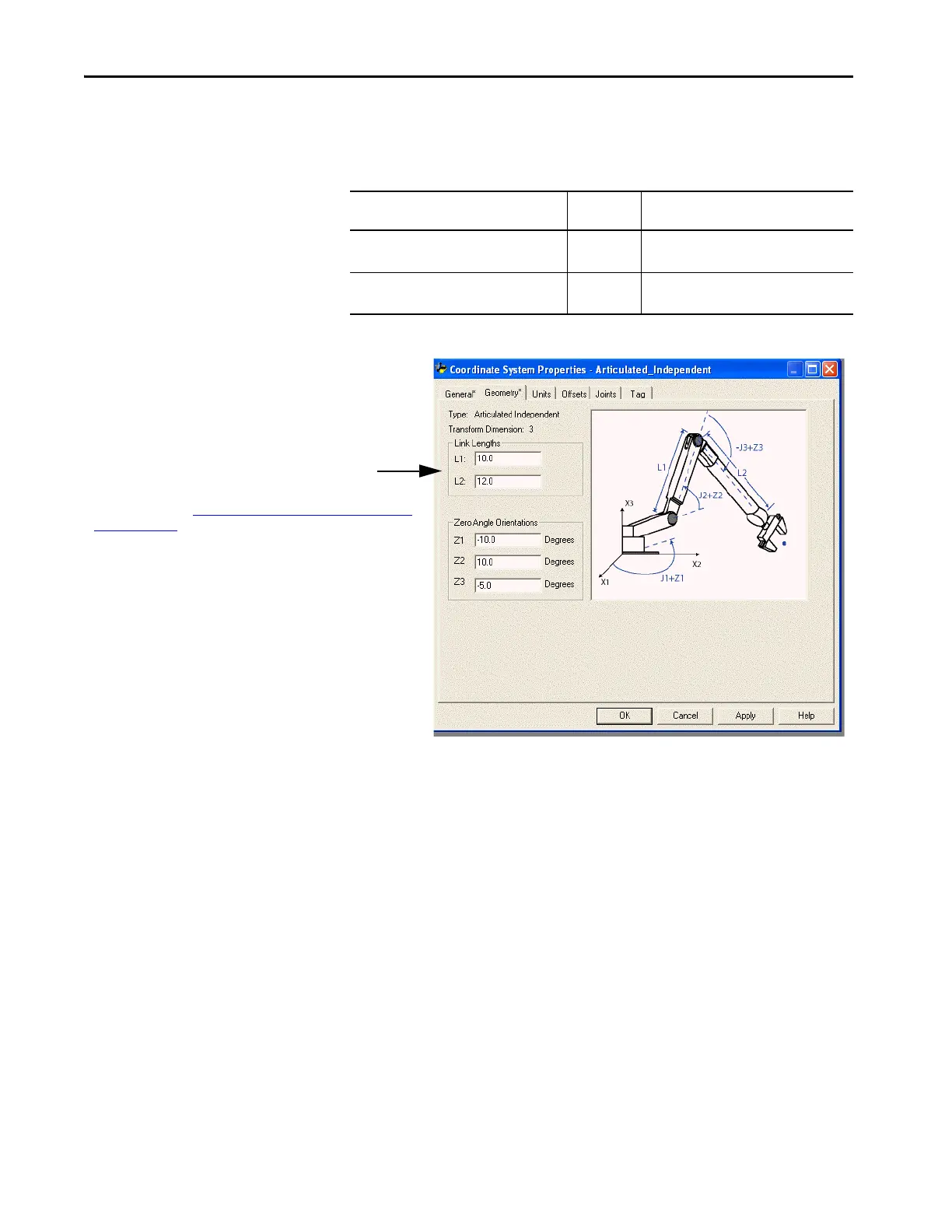
Enter the Link Length values.
For the robot shown in Typical Configuration Parameters for an Articulated
Independent Robot, the Link Length values are:
• L1 = 10.0
• L2 = 12.0

 Loading...
Loading...





