Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016 61
Configure an Articulated Independent Robot Chapter 4
Base Offsets
The base offset is a set of coordinate values that redefines the origin of the
robot. The correct base offset values are typically available from the robot
manufacturer. Enter the values for the base offsets in the X1b and X3b fields of
the Coordinate System Properties dialog.
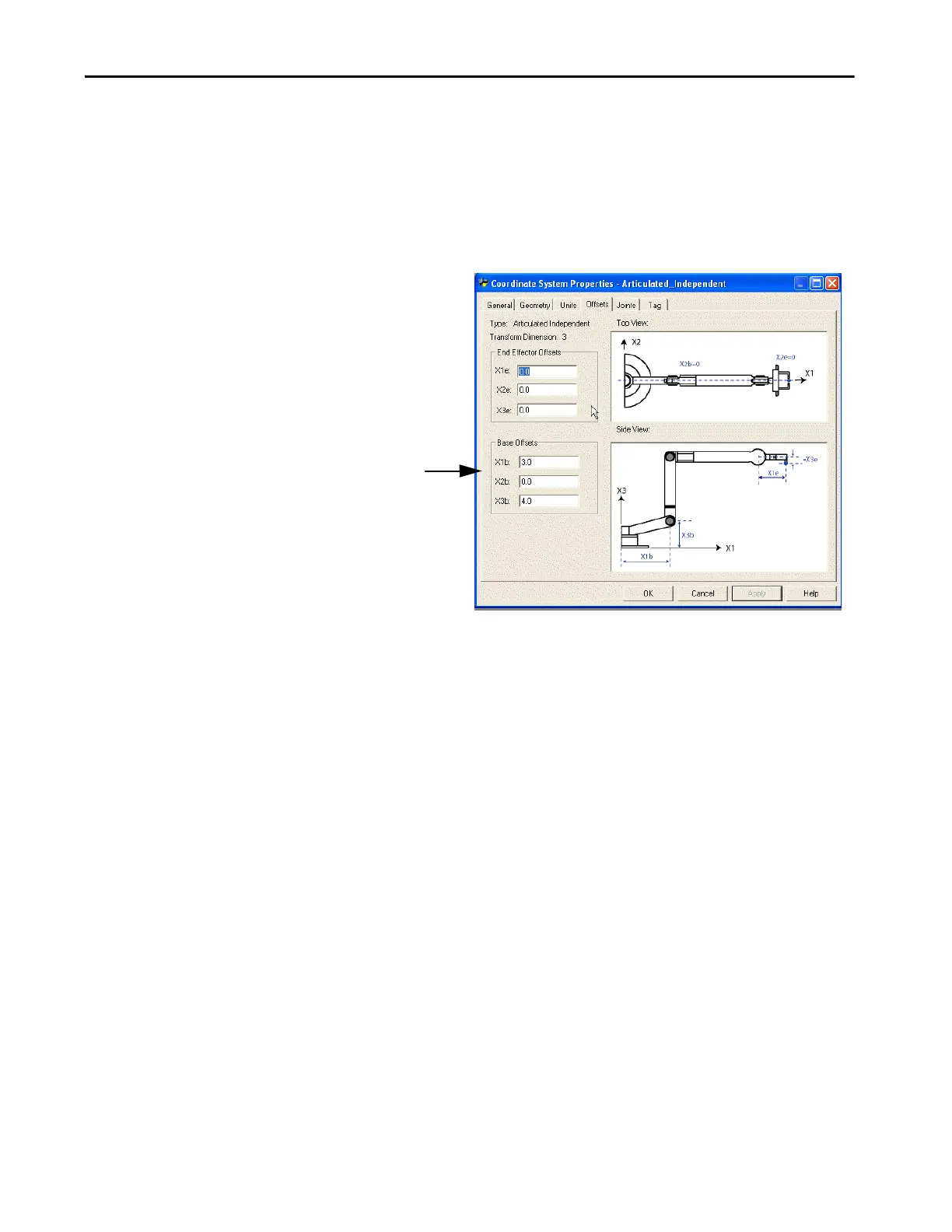
Figure 15 - Example of Base Offsets for an Articulated Independent Robot
Enter the Base Offset values.
For the robot shown in our example, the Base Offset values
are:
• X1b = 3.0
• X3b = 4.0

 Loading...
Loading...





