80 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 4 Configure an Articulated Independent Robot
Configure a Delta Robot with a Negative X1b Offset
Beginning with version 17 of the application, you can use negative offsets for
the X1b base offset on both 2D and 3D delta geometries. For example, a
mechanical 2D delta robot that uses a negative X1b offset has a mechanical
configuration like the one shown here.
The base offset X1b is the value equal to the distance from the origin of the
robot coordinate system to one of the actuator joints. In the previous figure,
one of the actuator joints (P1), is on the negative side of X1. Therefore, the
base offset X1b is measured to be a value of -10 units from the origin of the
coordinate system (X1 - X2 intersection) to P1.
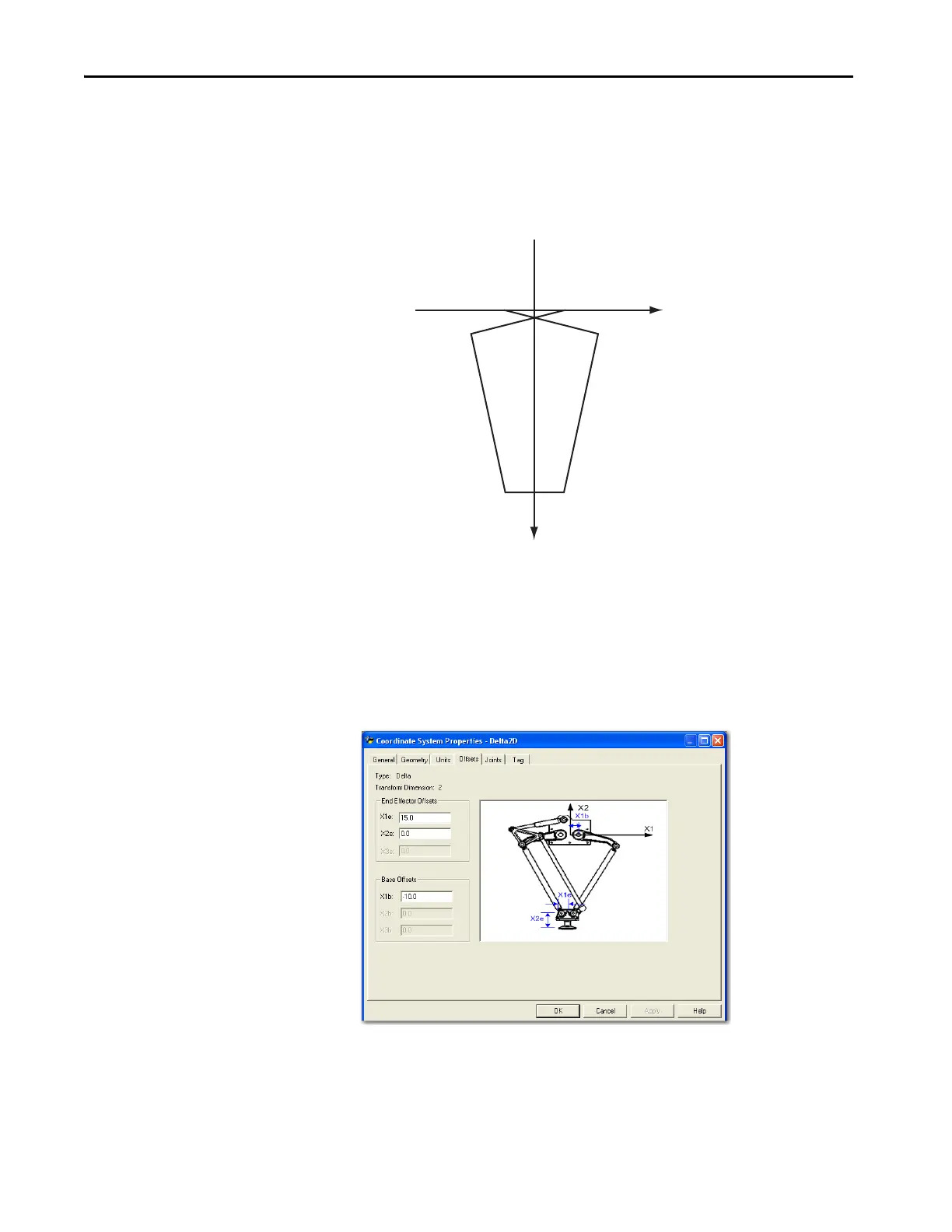
The Logix Designer application coordinate system configuration for the offset
tab used with the example in the previous figure is shown here.
This negative offset description also applies for Delta 3D and SCARA-Delta
Configurations.
+X1
+X2
X1eX1e
L2 L2
L1 L1
P1 P2
-X1b
-X1b
L1 = 50.0 units
L2 = 80.0 units
X1b = -10 units
X1e = 15 units

 Loading...
Loading...





