108 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 8 Configure Camming
Mechanical camming has the following characteristics:
• There is a physical connection between the cam and the follower.
• The follower conforms to the cam shape as the cam unit rotates.
• Motion is limited by the cam shape.
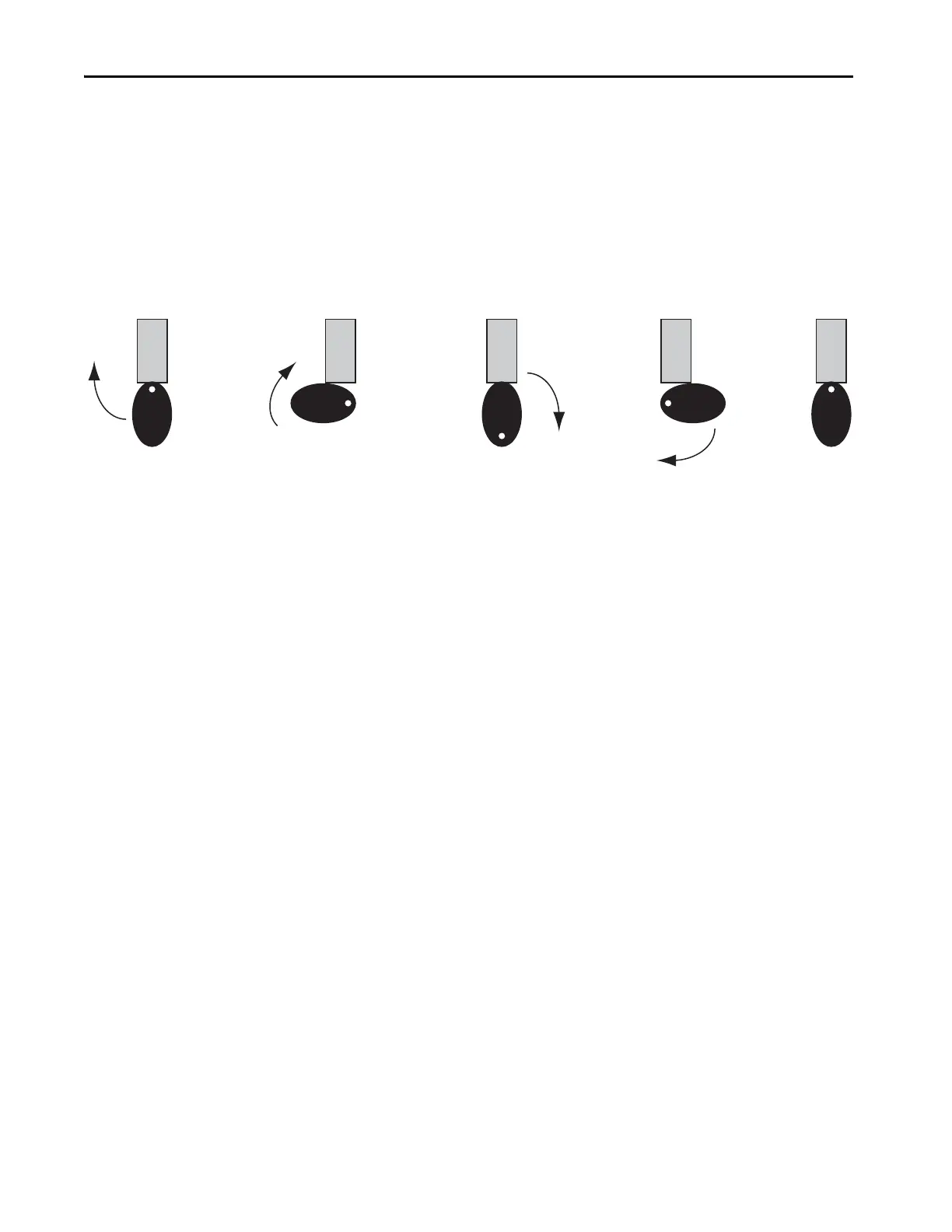
This figure illustrates a mechanical cam turning in a clockwise manner and the
affect it has on a follower that is physically connected to it.
Figure 50 - Mechanical Cams
Electronic Camming
Electronic camming is an electronic replacement for a mechanical camming. In
this case, there is still a master axis that produces variable and reciprocating
motion in a slave axis. However, electronic camming coordinates the
movement of the two separate axes without a physical connection between
them. There is no physical cam or follower assembly.
In addition to removing the physical connection between axes, electronic
camming:
• Creates coordinated motion profiles that are functions of the time or
relative position of another axis.
• Allows you to configure higher cam velocities.
• Is defined by using a ‘point pair’ table of values. This table is a master
axis set of point positioning values and a corresponding set of slave axis
point positioning values.
The user-defined position point array causes one closed-loop axis to
move with another open or closed-loop axis.

 Loading...
Loading...





