84 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 4 Configure an Articulated Independent Robot
Encounter a No-solution Position
When a robot is programmed to move beyond its work envelope, there is no
mathematical joint position for the programmed Cartesian position. The
system forces an error condition.
For example, if an Articulated Independent robot has two 10-inch arms, the
maximum reach is 20 inches. Programming to a Cartesian position beyond 20
inches produces a condition where no mathematical joint position exists.
Configure a SCARA
Independent Robot
The typical SCARA Independent robot has two revolute joints and a single
prismatic joint. This robot is identical to the Articulated Independent two-
dimensional robot except that the X1-X2 plane is tilted horizontally with a
third linear axis in the vertical direction. Use these guidelines when configuring
a SCARA Independent robot.
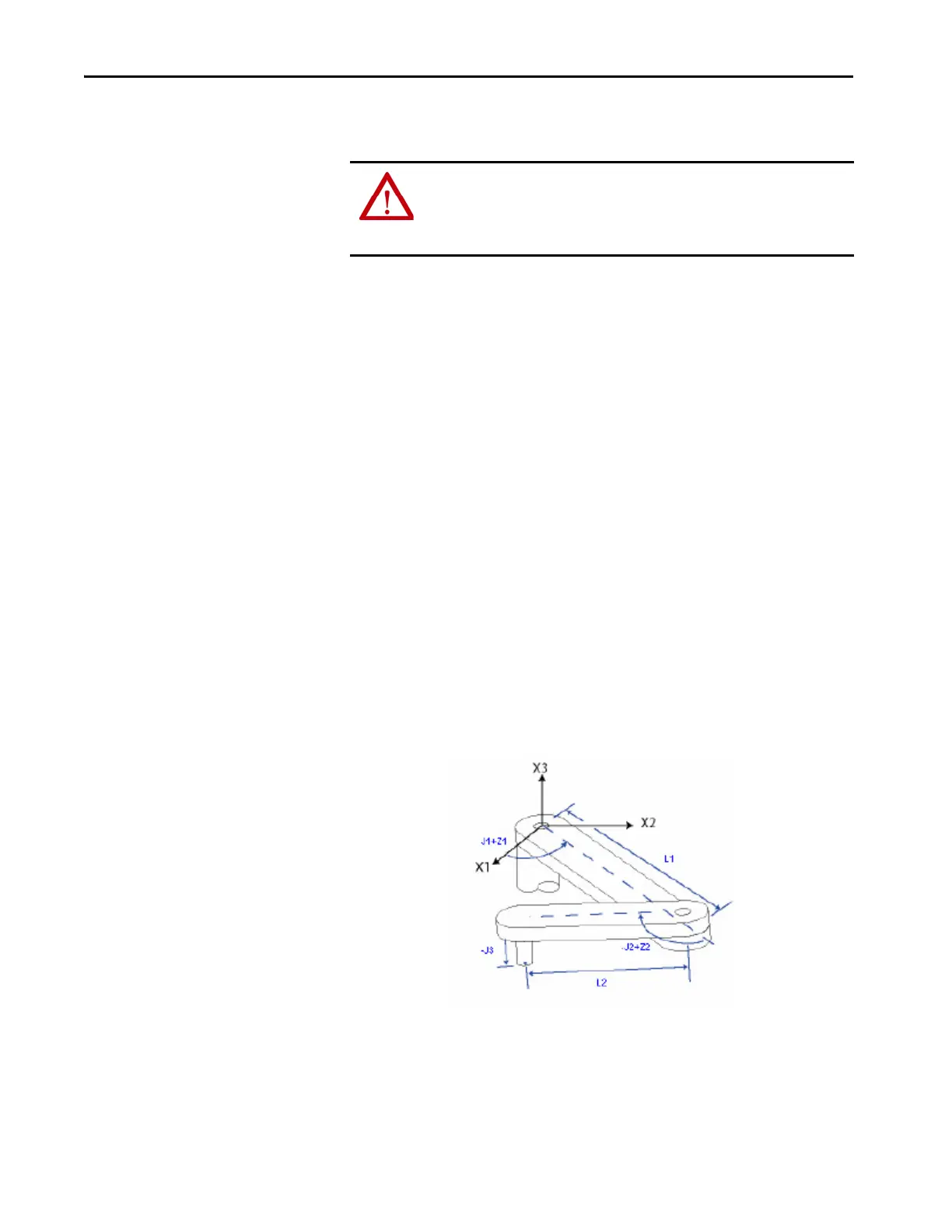
Establish the Reference Frame for a SCARA Independent Robot
The reference frame for the SCARA Independent geometry is at the base of
link L1.
Figure 34 - SCARA Independent Robot Reference Frame
ATTENTION: Avoid programming your robot towards a no solution position
when programming in Cartesian mode. The velocity of the robot increases
very rapidly as it approaches this position and can result in injury or death to
personnel.

 Loading...
Loading...





