38 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 2 Configure a Cartesian Coordinate System
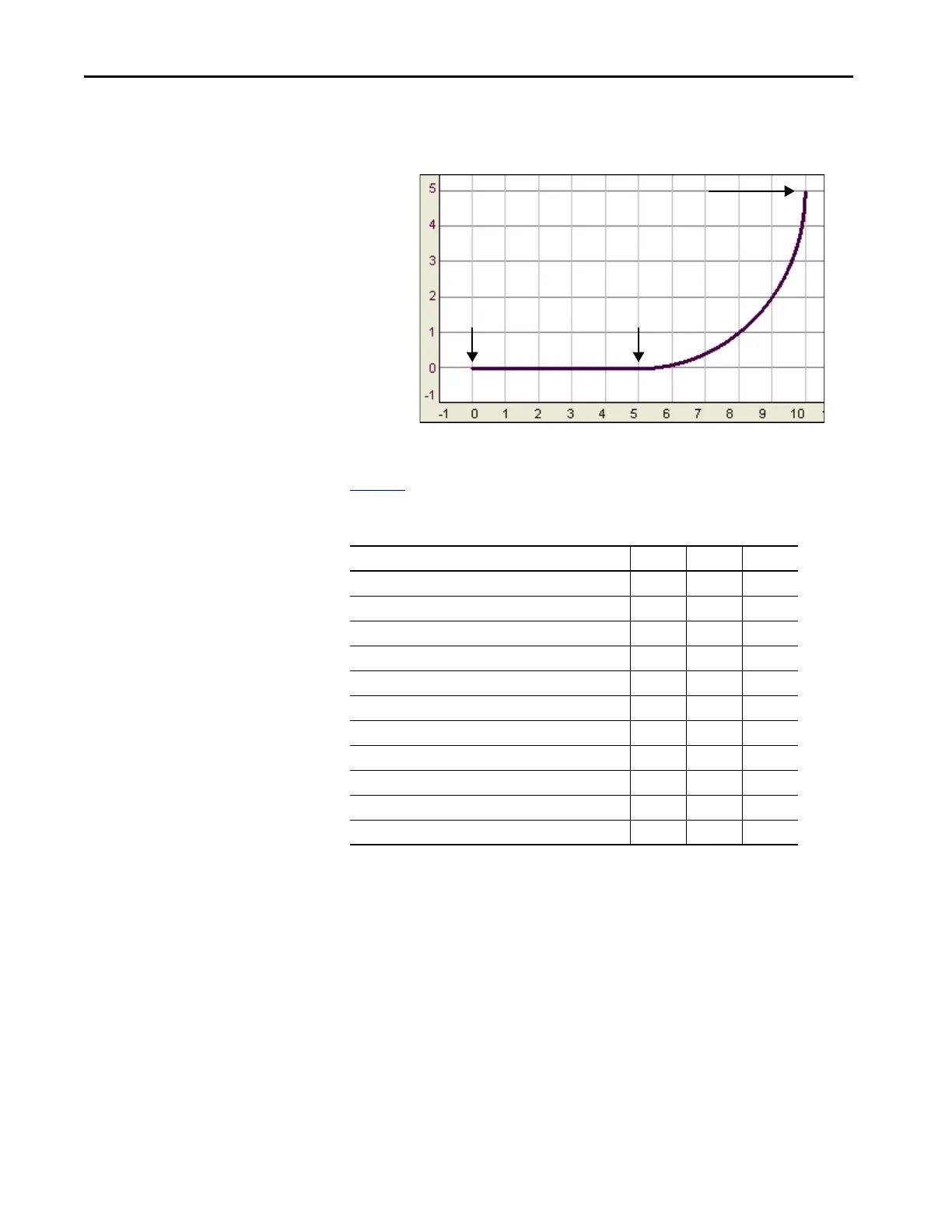
Bit States at Transition Points of Blended Move by Using Follow
Contour Velocity Constrained or Unconstrained
Tab le 1 3 shows the bits status at the transition points.
Y axis
X axis
TP1 TP2
TP3
linear ➞ circular move
Table 13 - Bit Status with Contour Velocity Constrained or Unconstrained Termination Type
Bit TP1 TP2 TP3
Move1.DN TTT
Move1.IP T F F
Move1.AC T F F
Move1.PC F T T
Move2.DN TTT
Move2.IP TTF
Move2.AC F T F
Move2.PC FFT
cs1.MoveTransitionStatus F F F
cs1.MovePendingStatus T F F
cs1.MovePendingQueueFullStatus T F F

 Loading...
Loading...





