48 Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016
Chapter 3 Configure Kinematics Coordinate Systems
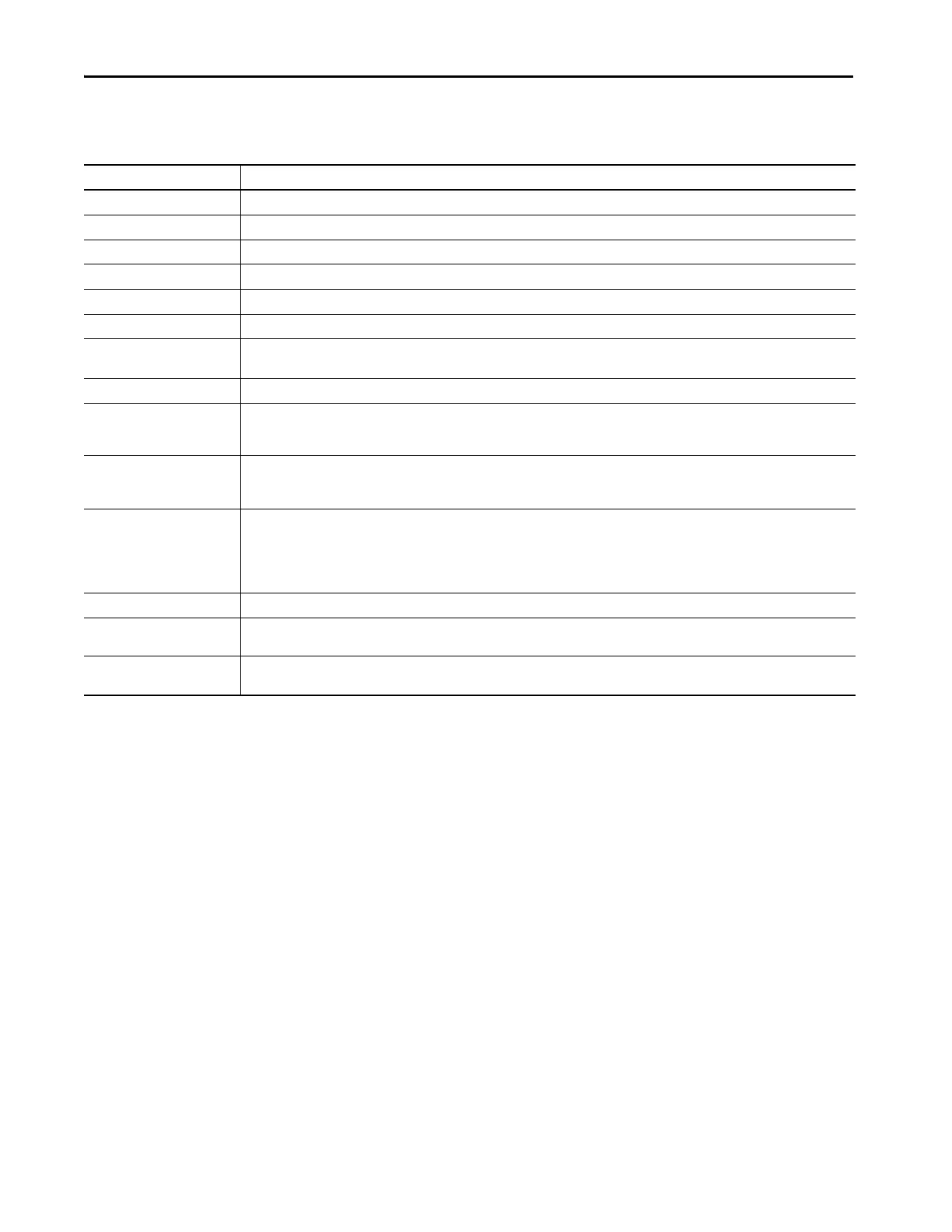
Useful Terms
Understanding the terms used in this chapter enables you to properly configure
your robot.
Gather Information about
Your Robot
Before you begin the configuration steps for the Kinematics transformation
function, you need to gather specific information about your robot and
application parameters. Specifications for your robot can be found in the
documentation provided by the manufacturer; other required information is
application dependent. You need to know this information before you begin
configuring motion control.
• Robot geometry type
• Zero angle orientation
•Work envelope
•Link lengths
• Base offsets
• End-effector offsets
•Arm solution
Summary of Kinematic Steps
After you create a Joint (target) coordinate system tag for your Motion control
project, there are general steps to follow for Kinematics.
Term Definition
Forward Kinematics The solution of source positions given the target positions. In practice, requires computing the Cartesian positions given the Joint positions.
Forward Transform The solution of source positions given target positions.
Inverse Kinematics The solution of joint positions given Cartesian positions. Typically, converts Cartesian positions to joint positions.
Inverse Transform The solution of target positions given source positions.
Joint axis A rotary robotic coordinate axis typically having overtravel rather than rollover limits.
Kinematics The family of mathematical equations that convert positions back and forth between two linked geometries.
Orientation Robotic term for directional attitude or rotation about a point in Cartesian (3D) space. Orientation is expressed as three ordered rotations
around the X, Y, and Z Cartesian axes.
Reference frame An imaginary Cartesian coordinate system used to define a Cartesian origin and reference orientation.
Source system One of two coordinate systems used in a Kinematics transform and having special properties. When connected to a target system by means of
a Kinematics transform, motion commanded at the source system’s inputs produces motion at both the source and target system’s outputs (if
the physical axes are connected).
Target system One of two coordinate systems used in a Kinematics transform and having special properties. When connected to a source system by means of
a Kinematics transform, motion commanded at the target system’s inputs produces motion in both the source and target system’s outputs (if
the physical axes are connected).
Tool Center Point All Kinematics programmed position (motion) is based on the Tool Center Point (TCP).
To determine the TCP, you must enter information on these Logix Designer application tabs:
• Geometry - Enter values for Link Length (linear displacement), Zero Angle Orientation (angular rotation), and Base Offsets. These values, in
combination with the selected Geometry type, defines the resulting Geometry’s end-of-arm position.
• Offsets - Enter value for End-effector offset; these are included when establishing the final TCP position.
Transform General term for conversion equations that map values in one coordinate space to values in another coordinate space.
Translation Robotic term for a linear movement or offset in Cartesian (three-dimensional) space. Translation describes the distance between two
Cartesian points.
Zero Angle Offset Offset on a rotary axis in the Joint Coordinate system between where the Kinematics equations were derived and where you want your zero
position to be.

 Loading...
Loading...





