Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016 45
Configure a Cartesian Coordinate System Chapter 2
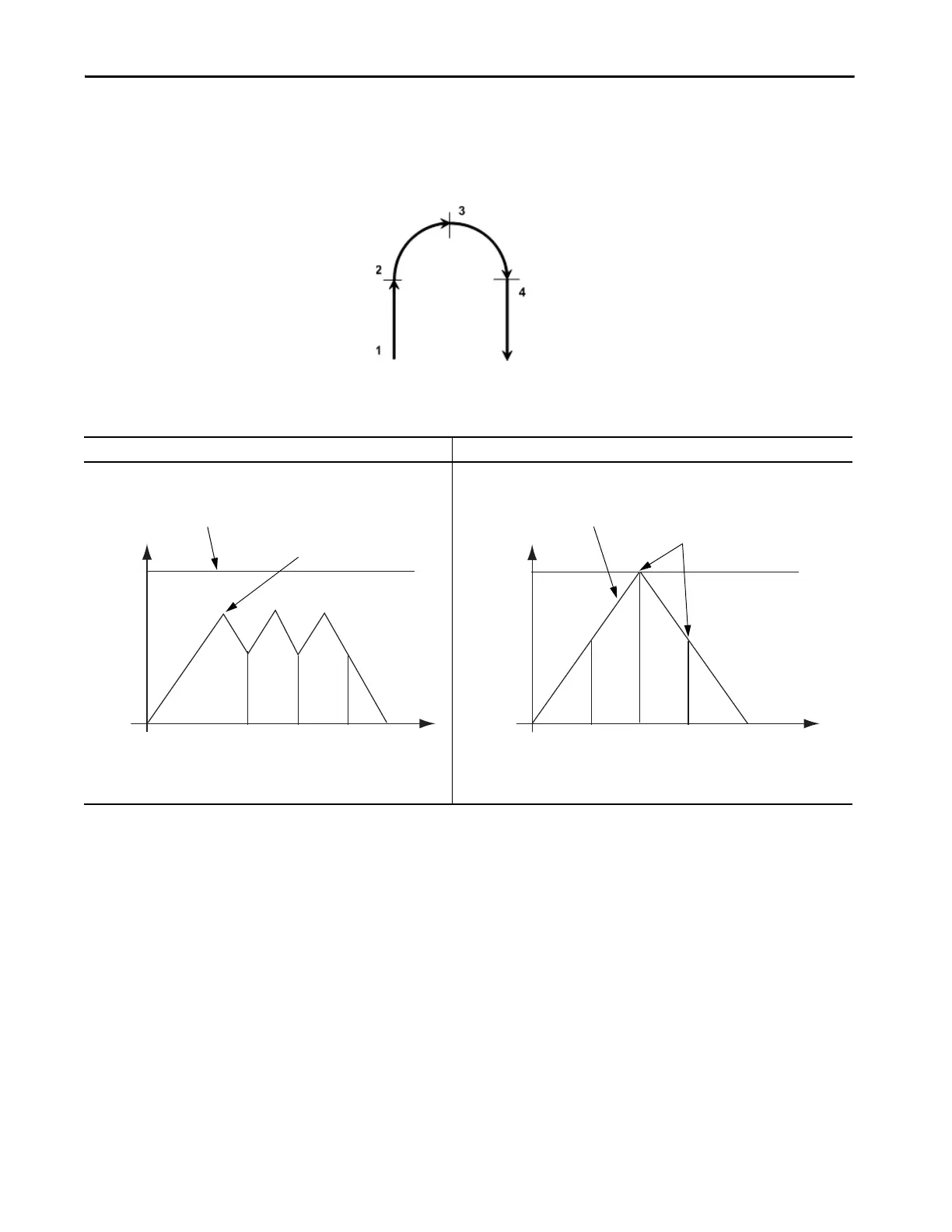
Triangular Velocity Profile
If you want to program a pick-and-place action in four moves, minimize the
Jerk rate, and use a triangular velocity profile.
Then, use termination type 5. The other termination types can prevent you
from getting to the speed you want.
Termination Types 2, 3, 4, or 6 Termination Type 5
The length of each move determines its maximum speed. As a result, the axes do
not reach a speed that causes them to overshoot the target position during
deceleration.
The axes accelerate to the speed that you want. You must calculate the starting speed for
each move in the deceleration-half of the profile.
You want to get to
this speed.
V
t
1234
But the axes have to decelerate
before they get there.
You calculate the
acceleration.
V
t
1234
And you must also calculate the
starting speed for each move during
deceleration.

 Loading...
Loading...





