Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016 69
Configure an Articulated Independent Robot Chapter 4
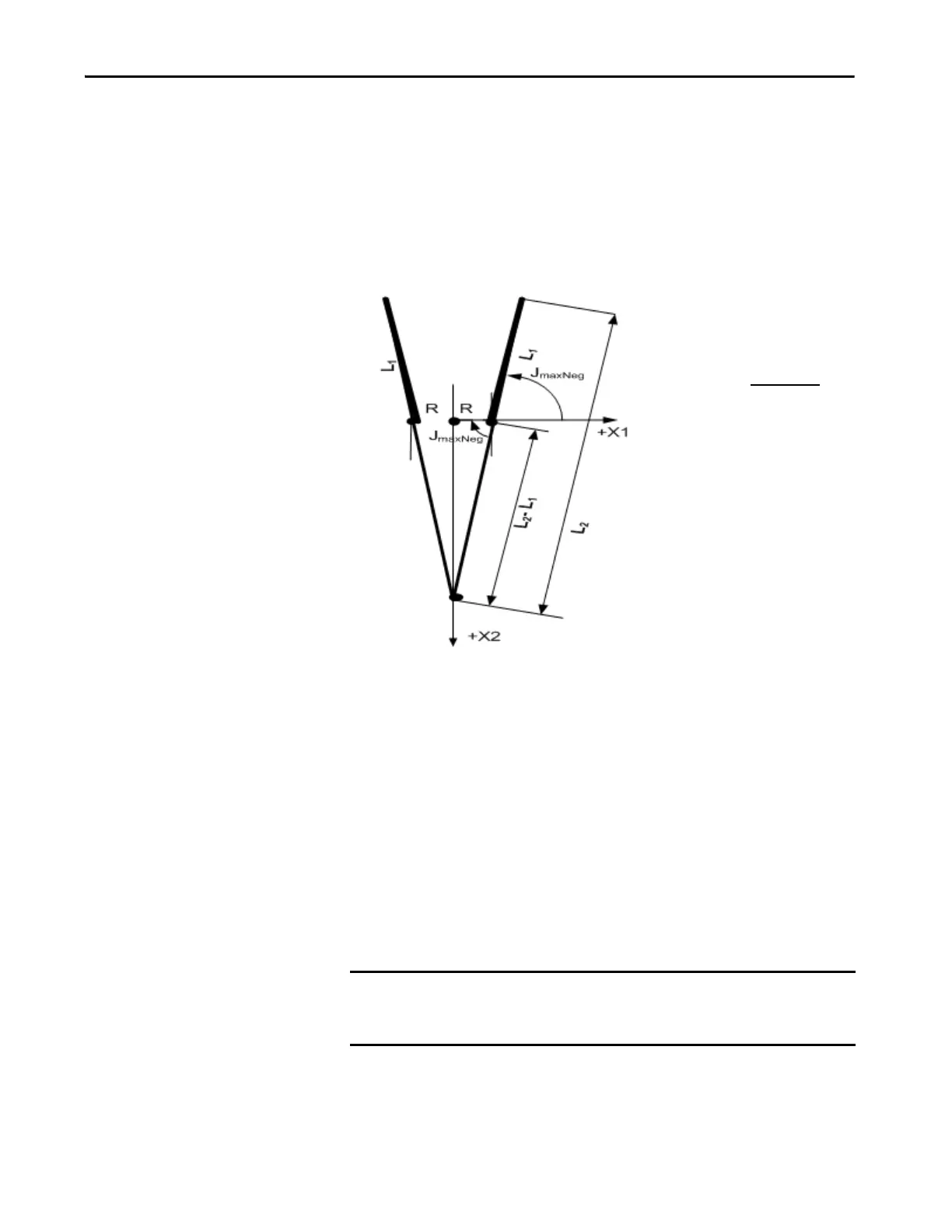
Maximum Negative Joint Limit Condition
The derivations for the maximum negative joint limit applies to the condition
when L1 and L2 are folded back on top of each other.
R is computed by using the base and end-effector offsets values (X1b and X1e).
Figure 22 - Maximum Negative Joint Limit Condition - L1 and L2 are Folded Back on Top of Each
Other
Define Configuration Parameters for a Delta Three-dimensional
Robot
Logix Designer application can be configured for control of robots with
varying reach and payload capacities. As a result, it is very important to know
the configuration parameter values for your robot including:
•Link lengths.
• Base offsets.
• End-effector offsets.
The configuration information is available from the robot manufacturer.
IMPORTANT Verify that the values for the link lengths, base offsets, and end-effector
offsets are entered into the Configuration Parameters dialog by using the
same measurement units.
Maximum Negative Joint Limit Condition
R = absolute value of (X1b - X1e)
JMaxNeg = -cos
-1

 Loading...
Loading...





