Rockwell Automation Publication MOTION-UM002E-EN-P - June 2016 71
Configure an Articulated Independent Robot Chapter 4
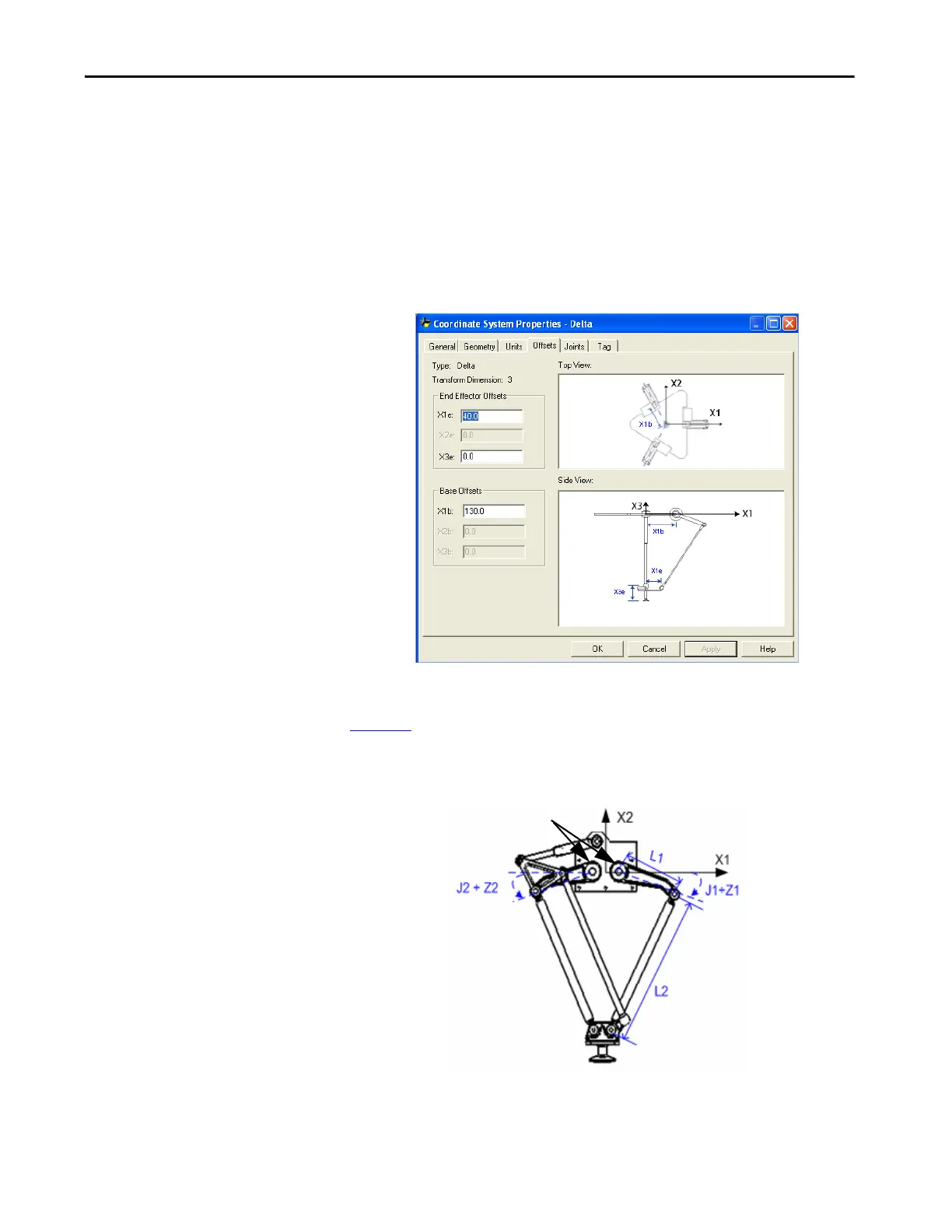
End-effector Offsets
The two end-effector offsets available for the three-dimensional Delta robot
geometry are as follows. Offset values are always positive numbers.
• X1e is the distance from the center of the moving plate to the lower
spherical joints of the parallel arms.
• X3e is the distance from the base plate to the TCP of the gripper.
Figure 24 - Configuring the Base Offset and End-effector Offsets for a Three-dimensional Delta
Robot
Configure a Delta Two-
dimensional Robot
Figure 25 shows a two-dimensional Delta robot that moves in two-
dimensional Cartesian space.
Figure 25 - Two-dimensional Delta Robot

 Loading...
Loading...





