Password Setups 335
SERCOS AXES
The SERCOS Interface™ controls the position loop from the amplifier. As a result, limited information
for motion is required in the control setups. Tuning is performed through serial port diagnostic
software available at the Drives & Motors Diagnostic screen.
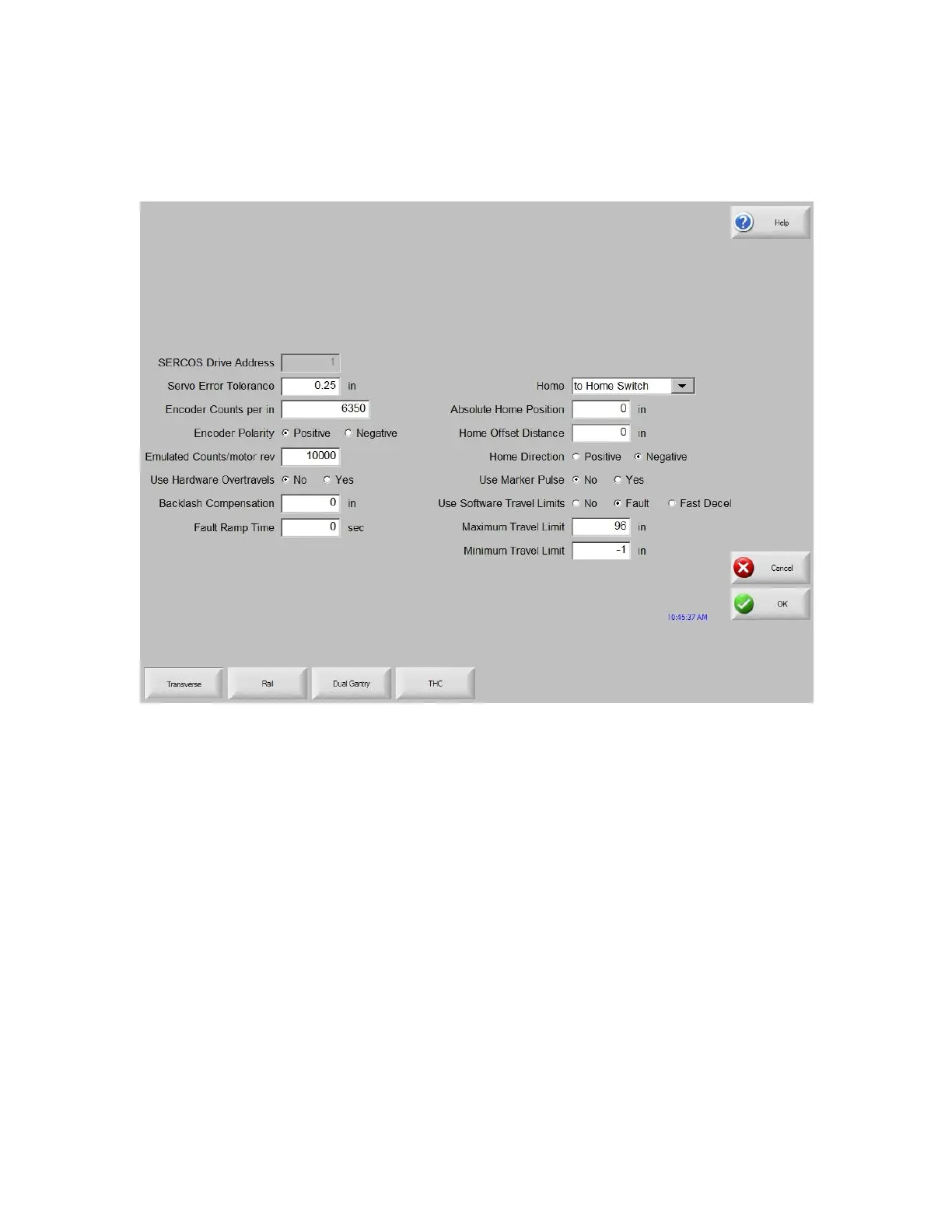
The following is a listing of the unique SERCOS parameters. Note: parameters will apply to all
SERCOS axes.
SERCOS Drive Address
Each Drive Axes is automatically assigned a Drive Address at the CNC. The appropriate drive
amplifier will be coded with the matching Drive Address to provide control motion to the correct
amplifier / motor on the SERCOS ring. Note: The drives may be physically located in any order on
the ring.
Emulated Encoder Counts/ motor rev
This parameter allows the user to adjust the number of counts per motor rev that the drive generates
over the SERCOS ring, to adjust resolution. This parameter is available for Pac Sci drives only.
Other drive types allow the emulated Counts /motor rev parameter to be set up in the drive tuning
software.
 Loading...
Loading...

