Additional functions
14.7 Learn compensation characteristics (QECLRNON, QECLRNOF)
Job planning
680 Programming Manual, 07/2010, 6FC5398-2BP40-0BA0
14.7 Learn compensation characteristics (QECLRNON, QECLRNOF)
Function
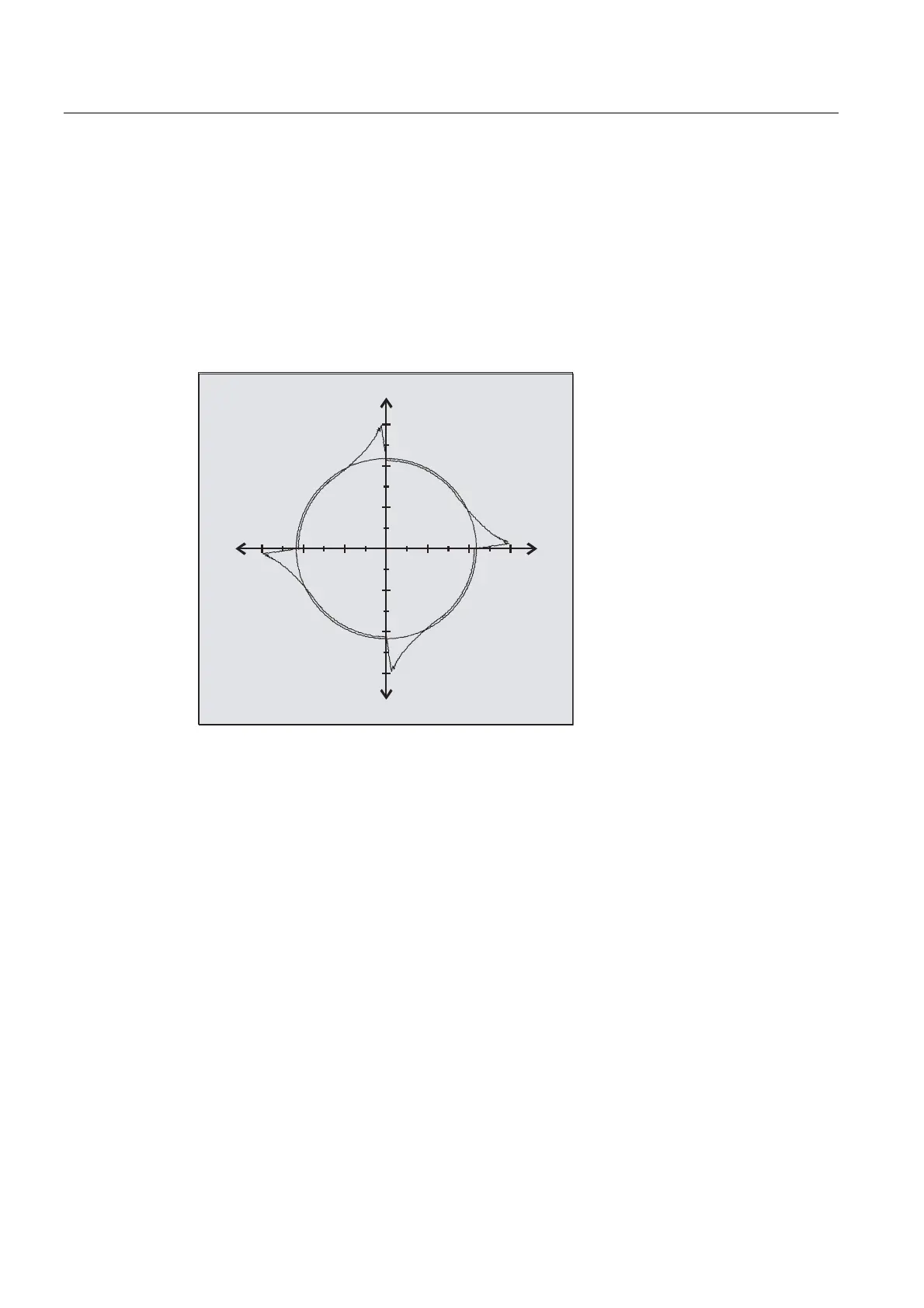
Quadrant error compensation (QEC) reduces contour errors that occur on reversal of the
traversing direction due to mechanical non-linearities (e.g. friction, backlash) or torsion. On
the basis of a neural network, the optimum compensation data can be adapted by the control
during a learning phase in order to determine the compensation characteristics
automatically. Learning can take place simultaneously for up to four axes.
P
[
P
,,
,9,,,
,
[
Syntax
QECLRNON
QECLRNOF
Activate learning operation: QECLRNON
The actual learning operation is activated in the NC program using the command
QECLRNON
specifying the axes:
QECLRNON (X1, Y1, Z1, Q)
The characteristics are only changed if the command is active.
Deactivating learning: QECLRNOF
After the learning motions of the required axes have been completed, the learning process is
simultaneously deactivated for all axes using
QECLRNOF.

 Loading...
Loading...














