2-395
2 Instruction Descriptions
NJ-series Instructions Reference Manual (W502)
Conversion Instructions
2
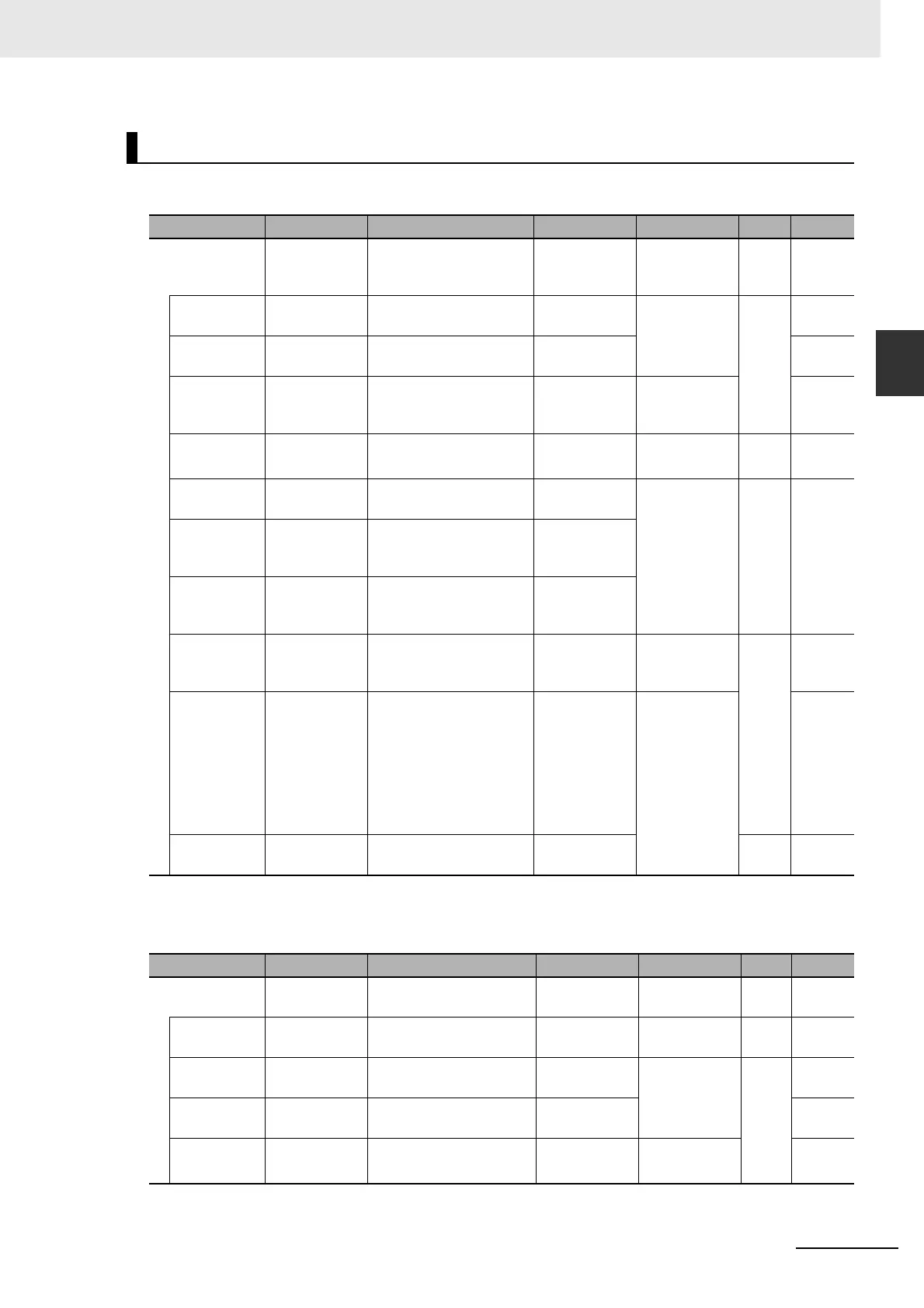
PIDAT
The data type of operation setting parameter OprSetParams is structure _sOPR_SET_PARAMS. The
specifications are as follows:
* MVLowLmt must be less than MVUpLmt.
The data type of initial setting parameter InitSetParams is structure _sINIT_SET_PARAMS. The specifi-
cations are as follows:
* RngLowLmt must be less than RngUpLmt.
Structure Specifications
Name Meaning Description Data type Valid range Unit Default
OprSetParams Operation Set-
ting Parame-
ters
Parameters that are set
during operation.
_sOPR_SET_
PARA MS
--- --- ---
MVLowLmt MV Lower
Limit
The lower limit of the
MV.
REAL
−320 to 320*
%
0
MVUpLmt MV Upper
Limit
The upper limit of the
MV.
REAL 100
ManResetVal Manual Reset
Value
The value of MV when
the deviation is 0 for the
proportional action.
REAL −320 to 320 0
MVTrackSw MV Tracking
Switch
TRUE: ON
FALSE: OFF
BOOL Depends on
data type.
--- FALSE
MVTrackVal MV Tracking
Value
The value that is set in
MV during MV tracking.
REAL
−320 to 320 %
0
StopMV Stop MV The value that is set in
MV when instruction
execution is stopped.
REAL
ErrorMV Error MV The value that is set in
MV when an error
occurs.
REAL
Alpha 2-PID Param-
eter α
The set point filter is dis-
abled if the set point filter
coefficient α is 0.
REAL 0.00 to 1.00
---
0.65
ATCalcGain Autotuning
Calculation
Gain
Adjustment coefficient
from autotuning results.
Stability is given higher
priority with higher val-
ues. The speed of
response is given higher
priority with lower val-
ues.
REAL
0.1 to 10.0
1.0
ATHystrs Autotuning
Hysteresis
The hysteresis of the
limit cycle.
REAL % FS 0.2
Name Meaning Description Data type Valid range Unit Default
InitSetParams Initial Setting
Parameters
Initial setting parameters. _sINIT_SET_
PARA MS
--- --- ---
SampTime Sampling
Period
The period for PID pro-
cessing.
TIME T#0.0001s to
#100.0000s
s T#0.1s
RngLowLmt Lower Limit of
Input Range
The lower limit of PV and
SP.
REAL
−32000 to
32000*
---
0
RngUpLmt Upper Limit of
Input Range
The upper limit of PV and
SP.
REAL 100
DirOpr Action Direc-
tion
TRUE: Forward action
FALSE: Reverse action
BOOL Depends on
data type.
FALSE

 Loading...
Loading...



