2-403
2 Instruction Descriptions
NJ-series Instructions Reference Manual (W502)
Conversion Instructions
2
PIDAT
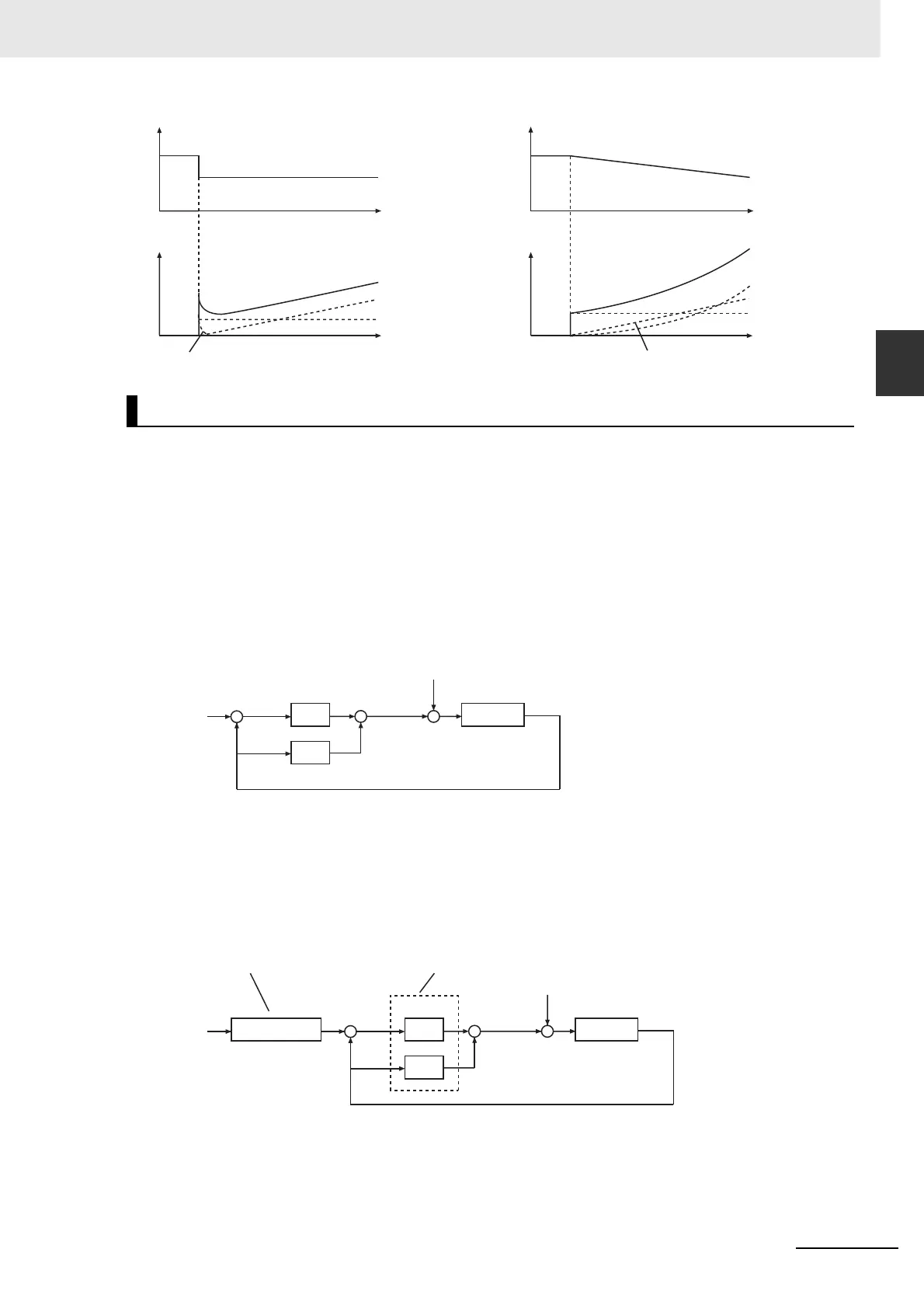
There are three main parameters that you must adjust to perform PID control: the proportional band,
integration time, and derivative time. These are called the PID constants. The values of the PID con-
stants affect the following two performances of PID control.
• Set point response: The ability to follow changes in the set point.
• Disturbance response: The ability of correcting the process value for large changes that are caused
by disturbances
A block diagram for basic PID control is shown below. The set point and disturbance enter the block dia-
gram at different positions. Therefore, finding the optimum PID constants for both set point response
performance and disturbance response performance is difficult. In other words, if the PID constants are
set for set point response, response to disturbances is slow. If the PID constants are set for disturbance
response, overshooting occurs.
To enable both set point response and disturbance response, 2-PID control is used. The 2 in “2-PID”
indicates that there are separate parameters to adjust the set point response and the disturbance
response. A block diagram for this is shown below. A set point filter that includes an adjustment param-
eter is added. The PID constants are adjusted to maximize disturbance response. A set point filter
adjusts the set point to optimize the set value response for those values. You can adjust the values of
the PID constants and the set value of the set point filter independently to increase both the set point
response and the disturbance response.
The formulas of the blocks of this instruction are shown below. The set point filter value (i.e., a coeffi-
cient for the set point) is adjusted by using the integration time and the 2-PID parameter α. The opti-
mum value of α is 0.65. It normally does not need to be changed. The lower the value of α is, the
smaller the influence of the set point filter is.
2-PID Control with Set Point Filter
Stepwise response
Ramp response
0
Time Time
Deviation
0
Deviation
0
Time Time
PID control
PID control
Integral action only
Derivative action only
Proportional action only
Integral action only
Proportional action only
Derivative action only
Manipulated
variable
0
Manipulated
variable
Set point
Deviation
Manipulated
variable
Process value
P+I
Controlled
system
Disturbance
D
++
+
+
−−
Set point
Adjustment for set point response
Adjustment for disturbance response
Deviation
Manipulated
variable
Process value
P+I
Controlled
system
Set point filter
Disturbance
D
++
+
+
−−

 Loading...
Loading...



