2-405
2 Instruction Descriptions
NJ-series Instructions Reference Manual (W502)
Conversion Instructions
2
PIDAT
The 2-PID parameter α is not adjusted very often, so the main parameters that are adjusted for this
instruction are the PID constants. The PIDAT instruction supports autotuning of the PID constants. The
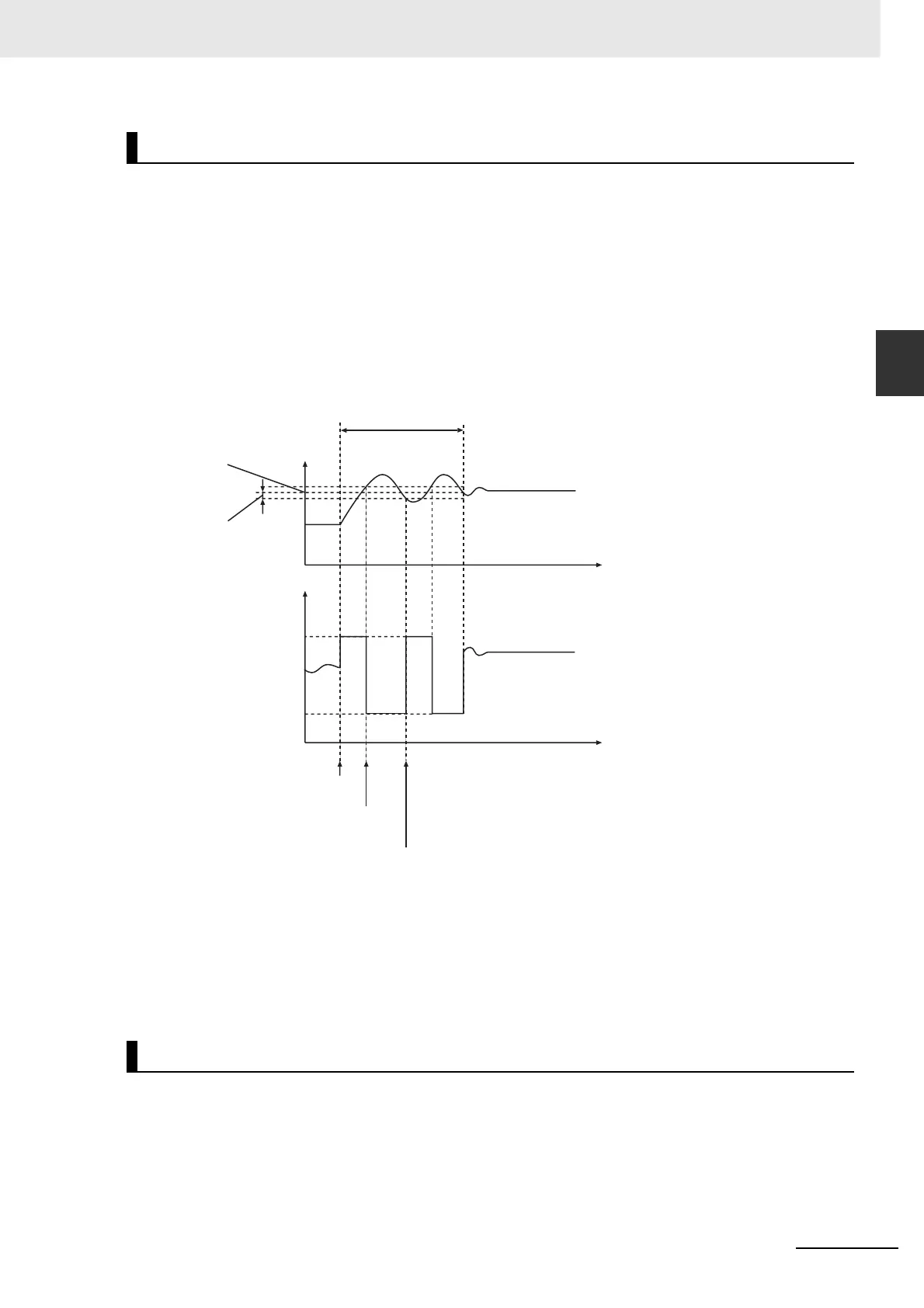
limit cycle method is used for autotuning. With the limit cycle method, the manipulated variable is tem-
porarily changed to the upper and lower limits of the manipulated variable to find the optimum PID con-
stants based on the resulting changes in the process value. If autotuning is executed when the set point
is greater than the process value, the manipulated variable is first set to the upper limit. When the devi-
ation reaches 0, the manipulated variable is set to the lower limit. When the deviation becomes greater
than the autotuning hysteresis, the manipulated variable is set to the upper limit again. This process is
repeated twice to calculate the optimum PID constants.
If autotuning is executed when the set point is less than the process value, the manipulated variable is
first set to the lower limit. Then, the optimum values for the PID constants are calculated with the proce-
dure that is given above.
Autotuning is executed during PID control (i.e., when the value of Run is TRUE) if the value of StartAT
changes to TRUE. If StartAT is TRUE when Run changes to TRUE, autotuning is executed at the start
of PID control. When autotuning is completed normally, the calculated PID constants are used immedi-
ately. Autotuning is canceled if the value of StartAT changes to FALSE during autotuning (i.e., when
AT B u s y is TRUE). If autotuning is canceled, PID control is started again with the previous PID con-
stants.
PID control is repeated periodically. PID processing is performed when the PIDAT instruction is exe-
cuted in the user program. However, if sampling period SampTime has not elapsed since the last time
PID processing was performed, PID processing is nor performed. If the elapsed time since the last time
PID processing was executed exceeds SampTime, the excess time (elapsed time − SampTime) is car-
ried forward to the next period. This is shown in the following diagram.
Autotuning
Execution Timing of PID Control
Process value
Set point
Autotuning hysteresis
MV upper limit
MV lower limit
Manipulated variable
Time
Time
Autotuning executed.
The manipulated variable is
set to the MV upper limit.
When the deviation reaches 0, the
manipulated variable is set to the MV
lower limit.
When the deviation becomes greater than
the autotuning hysteresis, the manipulated
variable is set to the MV upper limit again.

 Loading...
Loading...



