Startup Procedure and
Test Run
4
4.8 Fine Tuning during Test Runs (Adjust the Control Function)
SIEPYEUOQ2A01A AC Drive Q2A Technical Manual 159
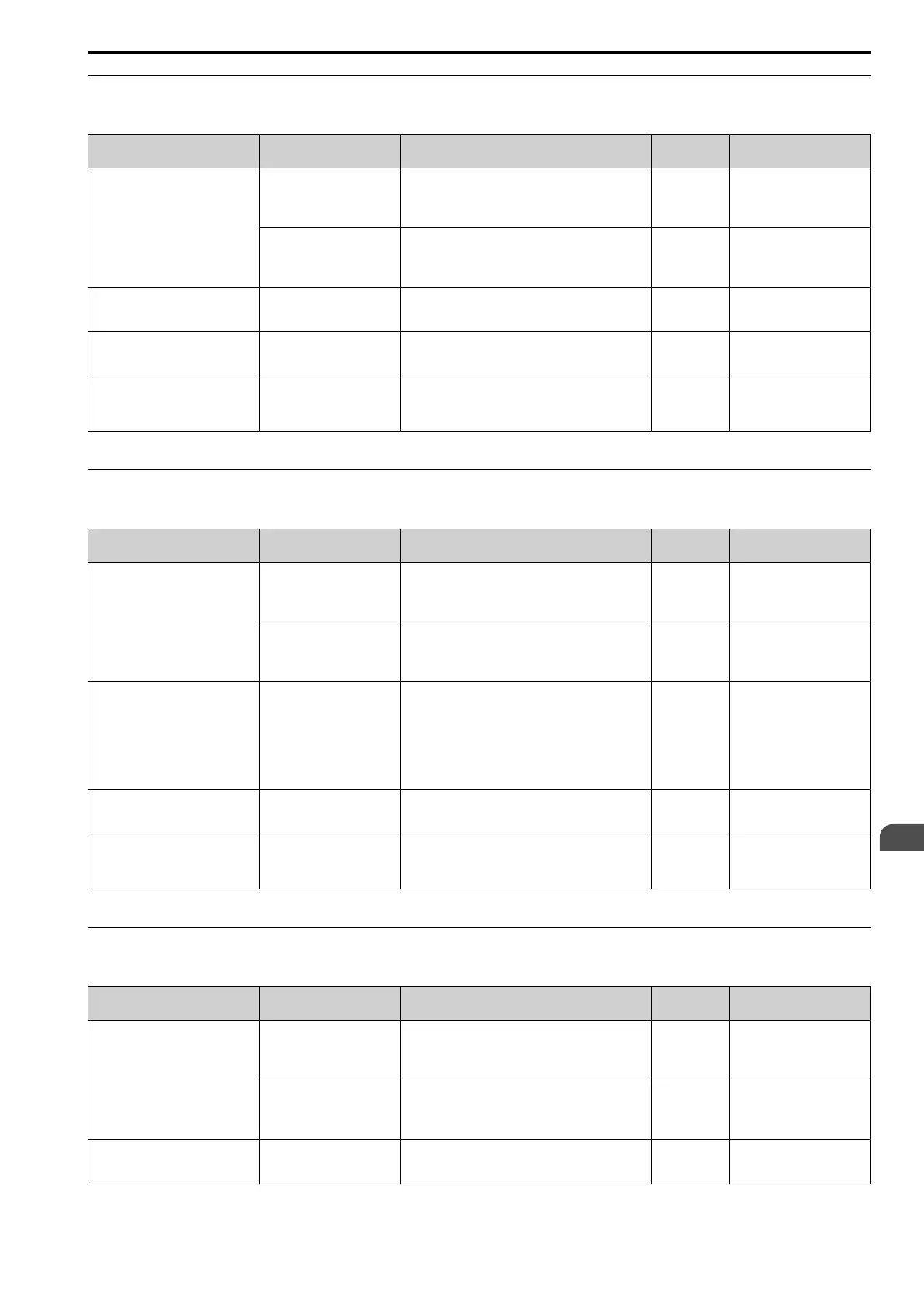
◆ Advanced Open Loop Vector Control Method for PM
Table 4.22 Parameters for Fine Tuning the Drive (Advanced Open Loop Vector Control Method for PM)
Issue Parameter Number Solution Default
Setting
Recommended Setting
• Torque or speed response are
slow.
• Hunting or oscillation
• High speed
C5-01 [ASR PGain 1]
• Low speed
C5-03 [ASR PGain 2]
• If torque or speed response are slow, increase the
setting value in increments of 5.00.
• If hunting or oscillation occur, decrease the setting
value.
10.00 5.00 - 30.00
*1
• High speed
C5-02 [ASR ITime 1]
• Low speed
C5-04 [ASR ITime 2]
• If torque or speed response are slow, decrease the
setting value.
• If hunting or oscillation occur, increase the setting
value.
0.500 s 0.300 to 1.000 s
*1
The drive cannot find ASR
proportional gain or integral time for
low speed or high speed.
C5-07 [ASR Gain Switch
Frequency]
Change the ASR proportional gain and ASR integral
time to conform to the output frequency.
0.0 %
0.0% to maximum rotation
speed
Hunting or oscillation C5-06 [ASR Delay Time]
If the rigidity of the machine is unsatisfactory and
vibration is possible, increase the setting value in
increments of 10 ms.
16 ms 16 to 35 ms
*1
Step-out
E1: V/F PARAMETER
MOTOR 1parameters, E5: PM
MOTOR SETTINGS
parameters
Refer to the motor nameplate or test report and set E1:
V/F PARAMETER MOTOR 1 or E5: PM MOTOR
SETTINGS parameters correctly.
- -
*1 The best values for a no-load operation are different than the best values for actual loading operation.
◆ Closed Loop Vector Control Method for PM
Table 4.23 Parameters for Fine Tuning the Drive (Closed Loop Vector Control Method for PM)
Issue Parameter Number Solution Default
Setting
Recommended Setting
• Torque or speed response are
slow.
• Hunting or oscillation
• High speed
C5-01 [ASR PGain 1]
• Low speed
C5-03 [ASR PGain 2]
• If torque or speed response are slow, increase the
setting value in increments of 5.00.
• If hunting or oscillation occur, decrease the setting
value.
20.00 10.00 - 50.00
*1
• High speed
C5-02 [ASR ITime 1]
• Low speed
C5-04 [ASR ITime 2]
• If torque or speed response are slow, decrease the
setting value.
• If hunting or oscillation occur, increase the setting
value.
0.500 s 0.300 to 1.000 s
*1
The drive cannot find speed response
for low speed or high speed.
• C5-07 [ASR Gain Switch
Frequency]
• High speed
C5-01 [ASR PGain 1]
C5-02 [ASR ITime 1]
• Low speed
C5-03 [ASR PGain 2]
C5-04 [ASR ITime 2]
Change the ASR proportional gain and ASR integral
time to conform to the output frequency.
0.0 %
0.0% to maximum rotation
speed
Hunting or oscillation C5-06 [ASR Delay Time]
If the rigidity of the machine is unsatisfactory and
vibration is possible, increase the setting value in
increments of 10 ms.
4 ms 4 to 20 ms
*1
Step-out
E1: V/F PARAMETER
MOTOR 1parameters,
E5: PM MOTOR SETTINGS
parameters
Refer to the motor nameplate or test report and set E1:
V/F PARAMETER MOTOR 1 or E5: PM MOTOR
SETTINGS parameters correctly.
- -
*1 The best values for a no-load operation are different than the best values for actual loading operation.
◆ EZ Open Loop Vector Control Method
Table 4.24 Parameters for Fine Tuning the Drive (EZ Open Loop Vector Control Method)
Issue Parameter Number Solution Default
Setting
Recommended Setting
• Torque or speed response are
slow.
• Hunting or oscillation
• High speed
C5-01 [ASR PGain 1]
• Low speed
C5-03 [ASR PGain 2]
• If torque or speed response are slow, increase the
setting value in increments of 5.00.
• If hunting or oscillation occur, decrease the setting
value.
10.00 10.00 - 50.00
*1
• High speed
C5-02 [ASR ITime 1]
• Low speed
C5-04 [ASR ITime 2]
• If torque or speed response are slow, decrease the
setting value.
• If hunting or oscillation occur, increase the setting
value.
0.500 s 0.300 to 1.000 s
*1
The drive cannot find ASR
proportional gain or integral time for
low speed or high speed.
C5-07 [ASR Gain Switch
Frequency]
Change the ASR proportional gain and ASR integral
time to conform to the output frequency.
0.0%
0.0% to maximum rotation
speed

 Loading...
Loading...




