Parameter List
11
11.7 F: OPTIONS
SIEPYEUOQ2A01A AC Drive Q2A Technical Manual 419
11.7 F: OPTIONS
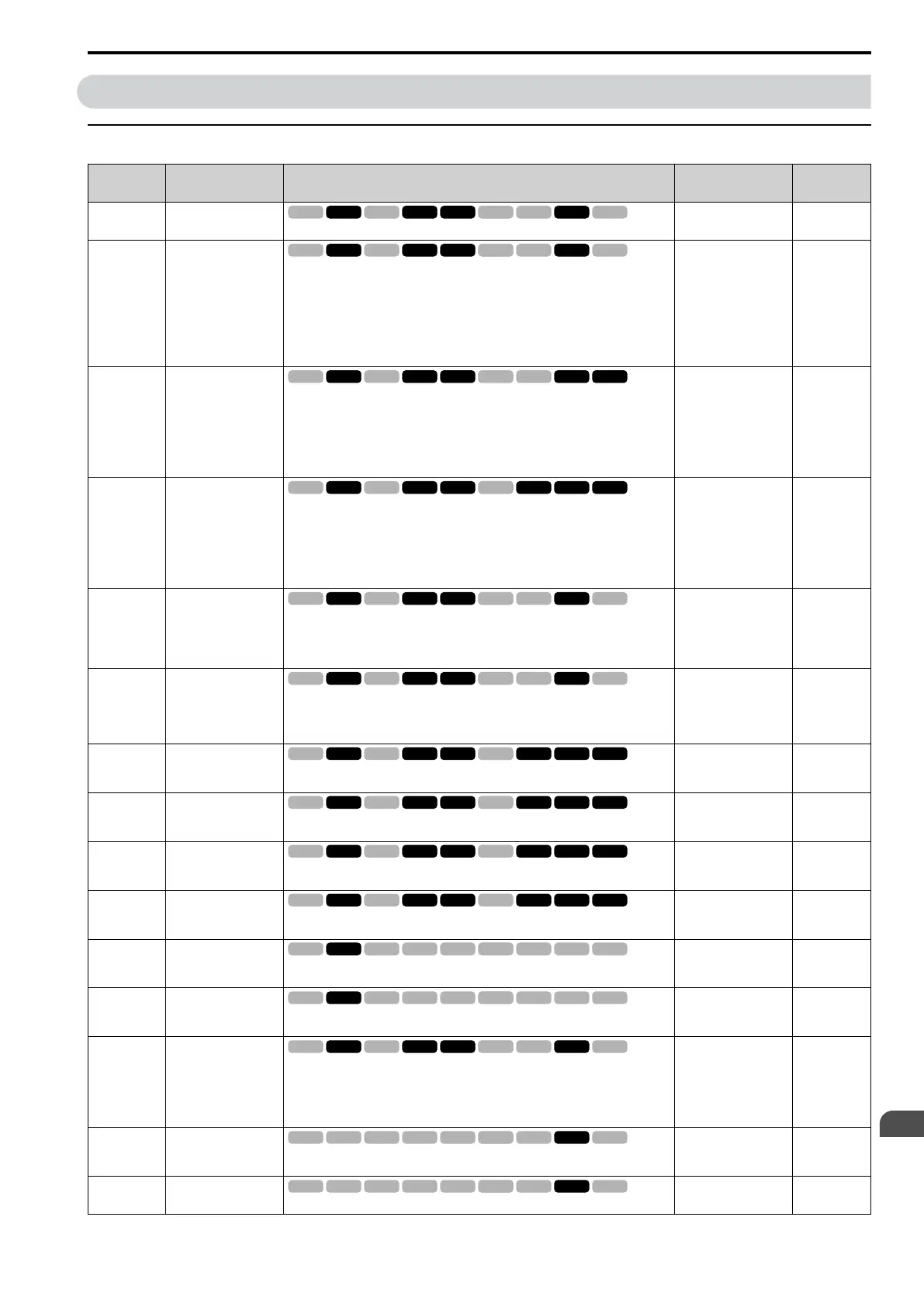
◆ F1: ENCODER
No.
(Hex.)
Name Description
Default
(Range)
Ref.
F1-01
(0380)
Enc1 Pulse Count (PPR)
Sets the number of output pulses for each motor revolution.
1024 ppr
(1 - 60000 ppr)
630
F1-02
(0381)
PGOpen Detection
Select
Sets the method to stop the motor or let the motor continue operating when the drive
detects a PGo [Encoder (PG) Feedback Loss].
0 : Ramp->Stop
1 : Coast->Stop
2 : Fast Stop (C1-09)
3 : Alarm Only
4 : No Alarm Display
1
(0 - 4)
630
F1-03
(0382)
Overspeed Detection
Selection
Sets the method to stop the motor or let the motor continue operating when the drive
detects a oS [Overspeed].
0 : Ramp->Stop
1 : Coast->Stop
2 : Fast Stop (C1-09)
3 : Alarm Only
1
(0 - 3)
630
F1-04
(0383)
Speed Dev Detection
Select
Sets the method to stop the motor or let the motor continue operating when the drive
detects a dEv [Speed Deviation].
0 : Ramp->Stop
1 : Coast->Stop
2 : Fast Stop (C1-09)
3 : Alarm Only
3
(0 - 3)
631
F1-05
(0384)
Enc1 Rotat Selection
Sets the output sequence for the A and B pulses from the encoder, assuming that the
motor is operating in the forward direction.
0 : A Leads in FWD Direction
1 : B Leads in FWD Direction
Determined by A1-02
(0, 1)
631
F1-06
(0385)
Enc1 Pulse Scaling for
Monitor
Sets the ratio between the pulse input and the pulse output of the encoder as a 3-digit
number. The first digit is the numerator and the second and third digits set the
denominator.
The dividing ratio = (1 + x)/yz when the setting value is a 3-digit value (xyz).
001
(001 - 032, 102 - 132 (1 -
1/32))
631
F1-08
(0387)
Overspeed Level
Sets the detection level of oS [Overspeed] as a percentage when the maximum output
frequency is 100%.
115%
(0 - 120%)
631
F1-09
(0388)
Overspeed Delay Time
Sets the length of time that the speed feedback must be more than the F1-08 level to
cause an oS [Overspeed].
Determined by A1-02
(0.0 - 2.0 s)
632
F1-10
(0389)
Speed Dev Level
Sets the detection level of dEv [Speed Deviation] as a percentage when the maximum
output frequency is 100%.
10%
(0 - 50%)
632
F1-11
(038A)
Speed Dev Delay Time
Sets the length of time that the difference between the frequency reference and speed
feedback must be more than the level in F1-10 to cause a dEv [Speed Deviation].
0.5 s
(0.0 - 10.0 s)
632
F1-12
(038B)
Enc1 Gear Teeth1
Sets the number of gear teeth on the motor side. This parameter and F1-13 [Enc1 Gear
Teeth2] set the gear ratio between the motor and encoder.
0
(0 - 1000)
632
F1-13
(038C)
Enc1 Gear Teeth2
Sets the number of gear teeth on the load side. This parameter and F1-12 [Enc1 Gear
Teeth1] set the gear ratio between the motor and encoder.
0
(0 - 1000)
632
F1-14
(038D)
Enc PGOpen Time for
Detection
Sets the length of time that the drive must not receive a pulse signal to cause a PGo
[Encoder (PG) Feedback Loss].
Note:
Motor speed and load conditions can cause ov [Overvoltage] and oC [Overcurrent]
faults.
2.0 s
(0.0 - 10.0 s)
632
F1-18
(03AD)
Dev3 Mode Selection
Sets the number of rotations necessary to detect conditions that invert the torque
reference and rate of acceleration and cause dv3 [Inversion Detection].
10
(0 - 10)
633
F1-19
(03AE)
Dev4 Mode Selection
Sets the number of pulses necessary to cause dv4 [Inversion Prevention Detection].
128
(0 - 5000)
633

 Loading...
Loading...




