6.2 Modbus Communications
218 SIEPYEUOQ2A01A AC Drive Q2A Technical Manual
■ Command Message from Master to Slave
To prevent data loss and overrun, after the master receives a message from the slave, the master cannot send the
same type of command message to the same slave for a selected length of time. The minimum wait time is
different for each type of message.
Table 6.4 Minimum Wait Time to Send a Message
Command Type Example Minimum Wait Time
1
• Operation commands (Run command, stop command)
• I/O settings
• Reading the motor and parameter setting values
5 ms
*1
2 Writing a parameter 50 ms
*1
3 Writing of modified data with the Enter command 3 to 5 s
*1
*1 When the drive receives a message in the minimum wait time, it does command type 1 and sends a response message. If the drive
receives command type 2 or command type 3 messages in the minimum wait time, it will trigger a communications error or the drive
will ignore the command.
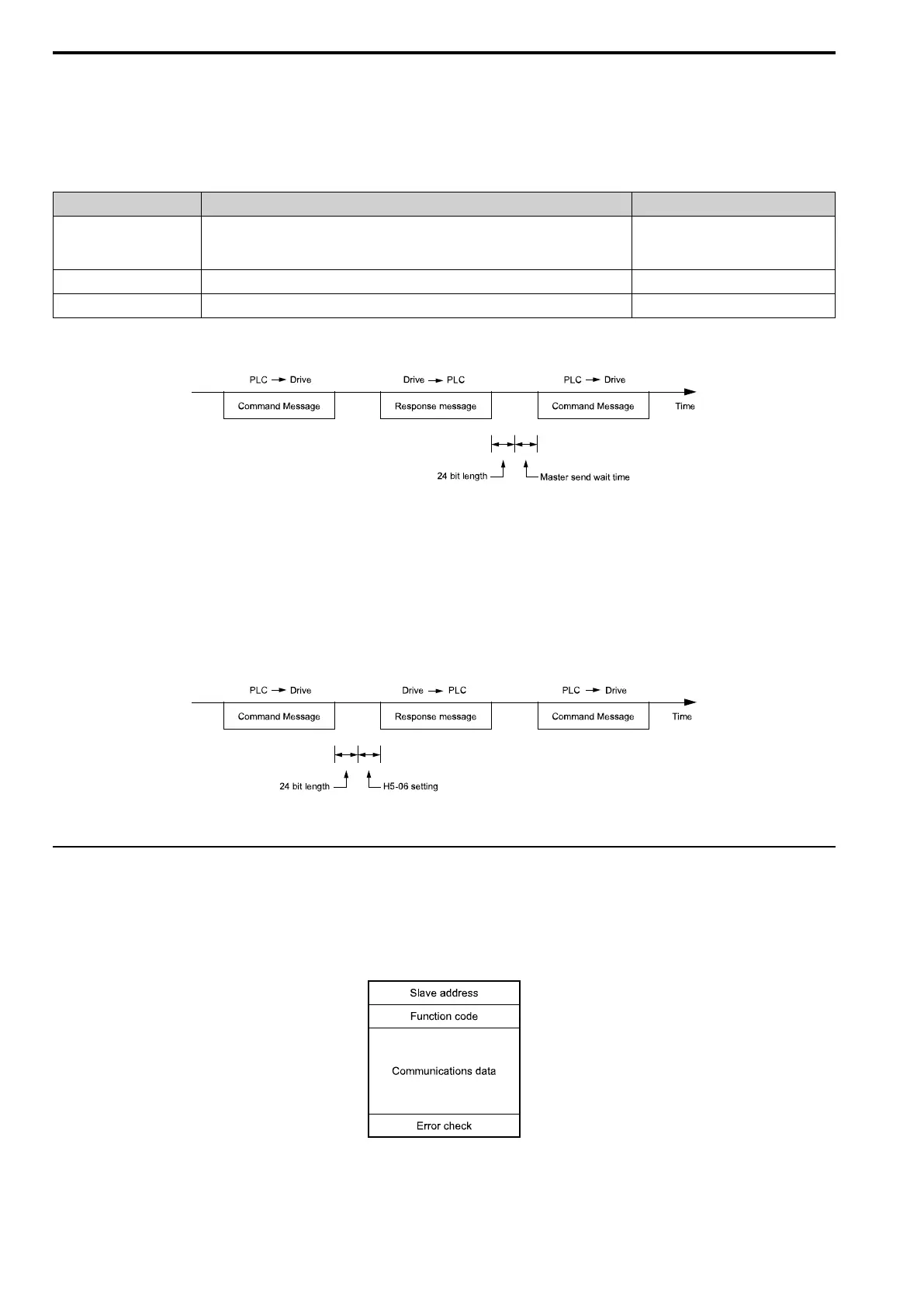
Figure 6.5 Minimum Wait Time to Send a Message
You must set the timer in the master to measure the length of time for the slave to respond to the master. If you set
the timer, but the slave does not send a response message in a specified length of time, the master will send the
message again.
■ Response Message from Slave
The slave receives the command message from the master then processes the data it received. The slave then waits
for the time set in H5-06 [Mbus Tx Wait Time] then sends a response message to the master. If overrun occurs on
the master, increase the wait time set in H5-06.
Figure 6.6 Response Wait Time
◆ Message Format
■ Communication Message Description
In Modbus communications, the master sends commands to the slave, then the slave responds. The master and
slave send their messages in the configuration in the following figure. The length of the data changes when the
description of the command (function) changes.
Figure 6.7 Message Format
 Loading...
Loading...





