format
Advanced
parameter
descriptions
Serial comms
4.1
Parameter
ranges
and
variable
maximums:
The two values provided define the minimum and maximum values for the given parameter. In some cases the parameter range is variable and
dependant on either:
•
other parameters,
•
the drive rating,
•
or a combination of these.
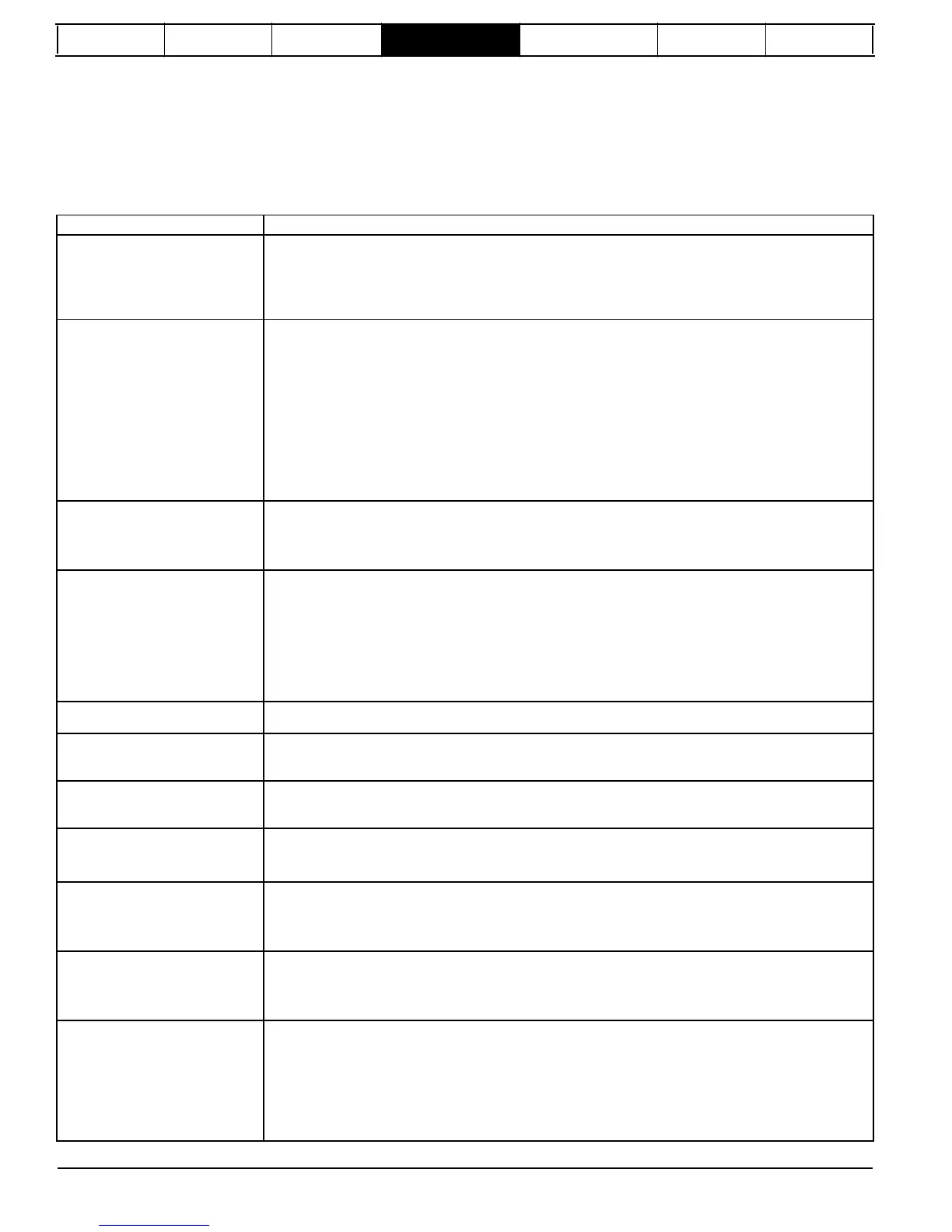
The values given in Table 4-1 are the variable maximums used in the drive.
18
Mentor MP Advanced User Guide
www.onxcontrol.com
Issue Number: 4
Maximum
MAX_SPEED_REF
[10000.0 rpm]
Maximum
speed
reference
If Pr
1.08
= 0: MAX_SPEED_REF = Pr
1.06
(
SE02,
0.23
)
If Pr
1.08
= 1: MAX_SPEED_REF is Pr
1.06
(
SE02,
0.23
) or – Pr
1.07
(
SE01,
0.22
) whichever is the largest
(If the second motor map is selected Pr
21.01
is used instead of Pr
1.06
(
SE02,
0.23
) and Pr
21.02
instead of
Pr
1.07
(
SE01,
0.22
))
SPEED_LIMIT_MAX
[10000.0 rpm]
Maximum
applied
to
speed
reference
limits
A maximum limit may be applied to the speed reference to prevent the nominal encoder frequency from
exceeding 500 kHz. The maximum is defined by
7
SPEED_LIMIT_MAX (in rpm) = 500 kHz x 60 / ELPR = 3.0 x 10
/ ELPR subject to an absolute maximum of
10,000 rpm.
ELPR is equivalent encoder lines per revolution and is the number of lines that would be produced by a
quadrature encoder.
Quadrature encoder ELPR = number of lines per revolution
F and D encoder ELPR = number of lines per revolution / 2
This maximum is defined by the device selected with the speed feedback selector (Pr
3.26
(
Fb01,
0.71
)) and
the ELPR set for the position feedback device.
SPEED_MAX
[10000.0 rpm]
Maximum
speed
This maximum is used for some speed related parameters in menu 3. To allow headroom for overshoot etc. the
maximum speed is twice the maximum speed reference.
SPEED_MAX = 2 x MAX_SPEED_REF
MAX_RAMP_RATE
MAX_RAMP_RATE_M2
[3200.000]
Maximum
ramp
rate
If (Pr
1.06
(
SE02,
0.23
) [Pr
21.01
] >= 1000 and Pr
2.39
= 0) or Pr
2.39
>= 1000 then
MAX_RAMP_RATE = 3200.000
Else if Pr
2.39
= 0
MAX_RAMP_RATE = 3200 * Pr
1.06
(
SE02,
0.23
) [Pr
21.01
] / 1000.0
Else
MAX_RAMP_RATE = 3200 * Pr
2.39
/ 1000.0
End
if
DRIVE_CURRENT_MAX
[9999.99 A]
The maximum drive current is the current at the over current trip level and is given by:
DRIVE_CURRENT_MAX = RATED_CURRENT_MAX x 2
MOTOR1_CURRENT_LIMIT_MAX
[1000.0 %]
This maximum current limit setting is the maximum applied to the current limit parameters in motor map 1. See
introduction to Menu 4 for the definition.
MOTOR2_CURRENT_LIMIT_MAX
[1000.0 %]
Maximum
current
limit
settings
for
motor
map
2
This maximum current limit setting is the maximum applied to the current limit parameters in motor map 2. See
introduction to Menu 4 for the definition.
TORQUE_PROD_CURRENT_MAX
[1000.0 %]
Maximum
torque
producing
current
This is used as a maximum for torque and torque producing current parameters. It is
MOTOR1_CURRENT_LIMIT_MAX or MOTOR2_CURRENT_LIMIT_MAX depending on which motor map is
currently active.
USER_CURRENT_MAX
[1000.0 %]
Current
parameter
limit
selected
by
the
user
The user can select a maximum for Pr
4.08
(torque reference) and Pr
4.20
(percentage load) to give suitable
scaling for analog I/O with Pr
4.24
. This maximum is subject to a limit of
CURRENT_LIMIT_MAX.
USER_CURRENT_MAX = Pr
4.24
ARMATURE_VOLTAGE_MAX
[1025]
Maximum
armature
voltage
Vac x (2 x 3 / )
480 +10 % drive: 720
575 +10 % drive: 860
690 +10 % drive: 1025
NOTE
For 4 quadrant drives maximum armature voltage = Vac x 1.15
 Loading...
Loading...


