3-59
3 Specifications
G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
3-3 Servomotor Specifications
3
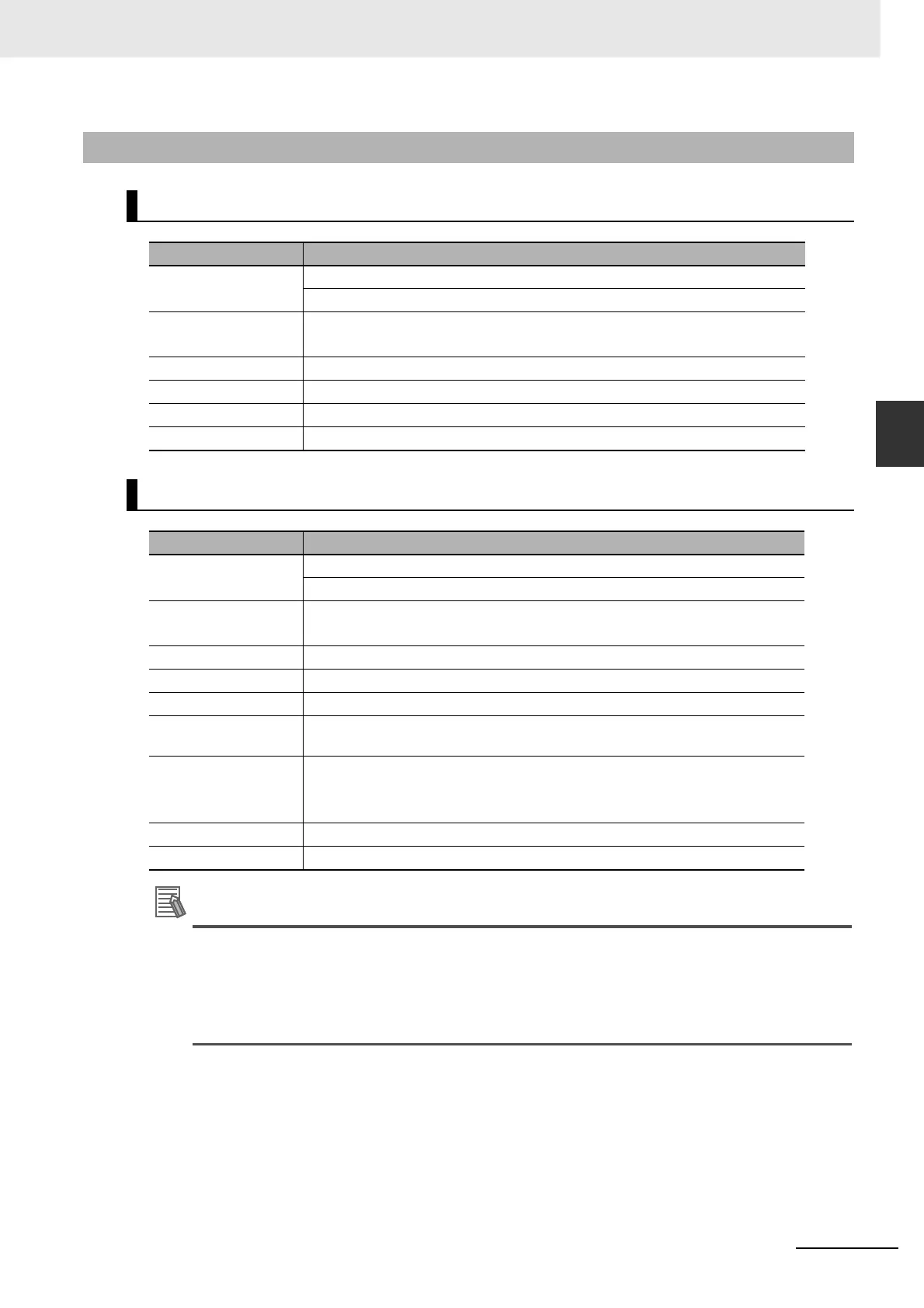
3-3-3 Encoder Specifications
Additional Information
Multi-rotation Data Backup
• The multi-rotation data will be lost if the battery cable connector is disconnected at the motor
when connecting the battery cable for the absolute encoder and battery.
• The multi-rotation data will be lost if CN2 is disconnected when connecting the battery to CN1
without the use of a battery cable for the absolute encoder.
3-3-3 Encoder Specifications
Incremental Encoder Specifications
Item Specifications
Encoder system Optical encoder
20 bits
Number of output
pulses
Phases A and B: 262,144 pulses/rotation
Phase Z: 1 pulse/rotation
Power supply voltage 5 VDC ± 5%
Power supply current 180 mA (max.)
Output signal +S, −S
Output interface RS485 compliant
Absolute Encoder Specifications
Item Specifications
Encoder system Optical encoder
17 bits
Number of output
pulses
Phases A and B: 32,768 pulses/rotation
Phase Z: 1 pulse/rotation
Maximum rotations −32,768 to +32,767 rotations
Power supply voltage 5 VDC ± 5%
Power supply current 110 mA (max.)
Applicable battery
voltage
3.6 VDC
Current consumption
of battery
265 µA (for a maximum of 5 s right after power interruption)
100 µA (for operation during power interruption)
3.6 µA (when power is supplied to the drive)
Output signal +S, −S
Output interface RS485 compliant

 Loading...
Loading...




