7-15
7 Applied Functions
G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
7-5 Brake Interlock
7
7-5-1 Objects Requiring Settings
7-5 Brake Interlock
This function lets you set the output timing for the brake interlock output (BKIR) that activates the
holding brake when the servo is turned ON, an error occurs, or the servo is turned OFF.
It is also possible to use the controller’s function to force the brake control via EtherCAT
communications. However, it is not supported on the OMRON Machine Automation Controller NJ-series
(Model: NJ501-100) and CJ1W-NC
81/82 Position Control Unit.
*1 The Brake Interlock Output (BKIR) is turned ON. The brake is released for a brake release command from either
EtherCAT communications or the Servo Drive.
*2 The Brake Interlock Output (BKIR) is turned OFF. The brake is engaged only when a set brake command is received from
both EtherCAT communications and the Servo Drive.
Applying the brake from EtherCAT communications is enabled only while the servo is OFF. If a Set Brake command is
received while the servo is ON, a Command Warning (B1 hex) will occur.
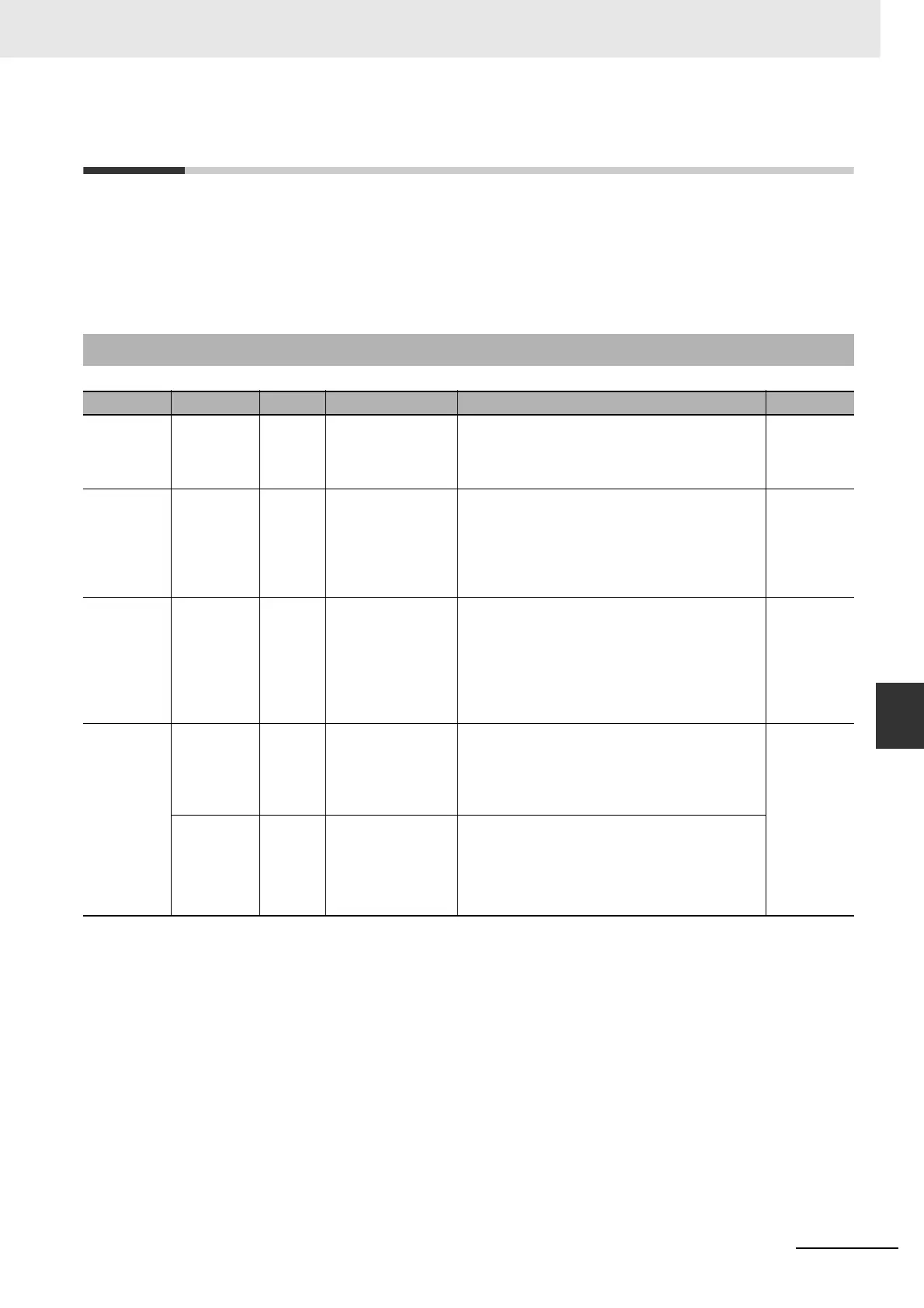
7-5-1 Objects Requiring Settings
Index Sub-index Bit Name Explanation Reference
3437 hex −−Brake Timing when
Stopped
Set the time after a servo OFF command is
issued upon servo lock stop, until the brake
interlock output (BKIR) turns OFF and power
supply stops.
page 9-38
3438 hex −−Brake Timing
During Operation
Set the time after a servo OFF command is
issued while the motor is rotating, until the brake
interlock output (BKIR) turns OFF and power
supply stops. If the speed drops to or below the
value set in object 3439 hex before the time set
here, BKIR will turn OFF.
page 9-39
3439 hex −−Brake Threshold
Speed During
Operation
Set the speed at which to turn OFF power to the
Servomotor when the Brake Interlock Output
(BKIR) signal turns OFF after execution of a
servo OFF command while the Servomotor is
rotating. If the time set in object 3438 hex
elapses before the Servomotor drops to the
speed set here, BKIR will turn OFF.
page 9-39
60FE hex 01 hex 0 This is the Set Brake Bit for EtherCAT
communications.
0: Brake released
*1
1: Brake engaged
*2
page A-93
02 hex 0 This is the Set Brake Mask Bit for enabling/
disabling the Set Brake Bit for EtherCAT
communications.
0: Set Brake Bit enabled.
1: Set Brake Bit disabled.

 Loading...
Loading...




