11 Adjustment Functions
11-18
G5-series AC Servomotors and Servo Drives User’s Manual (with Built-in EtherCAT Communications)
Precautions for Correct UsePrecautions for Correct Use
• Stop operation before changing the objects or switching with DFSEL.
• Damping control may not function properly or the effect may not be apparent under the
following conditions.
1
Adjust the position loop gain and speed loop gain.
Adjust Position Loop Gain 1 (3100 hex), Speed Loop Gain 1 (3101 hex), Speed Loop Integral
Time Constant 1 (3102 hex), and Torque Command Filter Time Constant 1 (3104 hex).
If no problem occurs in realtime autotuning, you can continue to use the settings.
2
Measure the damping frequency at the tip of the mechanical unit.
Measure the damping frequency by using a measurement device such as a laser displacement
sensor, servo acceleration meter, or acceleration pick-up.
Set the measured damping frequency in one of Damping Frequency 1 to Damping Frequency 4
(1: 3214 hex, 2: 3216 hex, 3: 3218 hex, 4: 3220 hex) according to the operation.
Also set the Switching Mode using Damping Filter Selection (3213 hex).
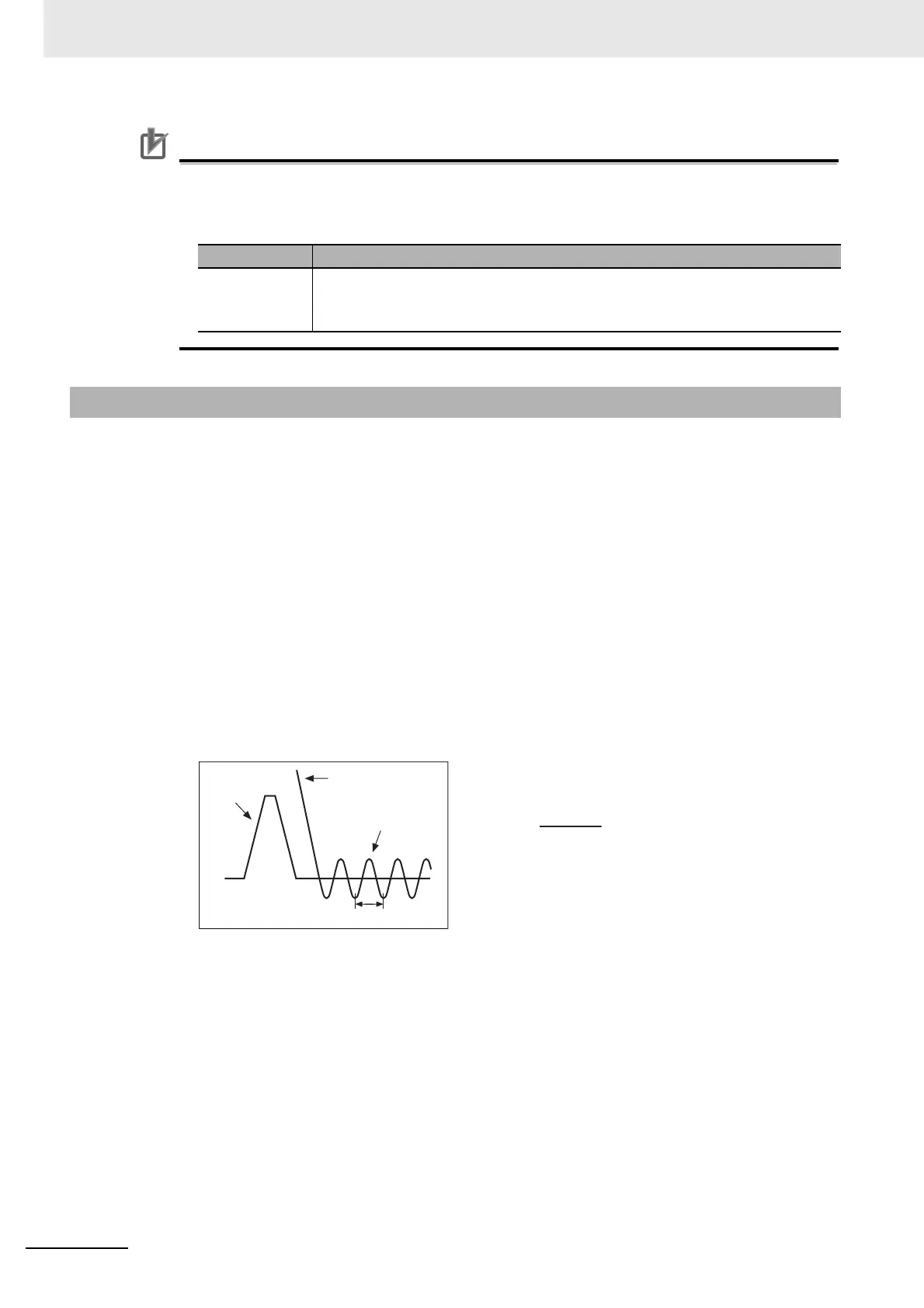
If the measurement device cannot be used, use CX-Drive tracing function, and read the residual
damping frequency (Hz) from the position error waveform as shown in the following figure.
If vibration persists after setting the frequency, increase or decrease the resonance frequency to
find a proper one with minimum vibration.
Item Conditions under which the effect of damping control is inhibited
Load condition • If forces other than position commands, such as external forces, cause vibration.
• If the damping frequency is outside the range of 1.0 to 200 Hz.
• If the ratio of the resonance frequency to anti-resonance frequency is large.
11-5-2 Operating Procedure
• The damping frequency in the figure is calculated with
the following formula:
Since the object unit is 0.1 Hz:
(3214 hex, 3216 hex, 3218 hex, 3220 hex) = 10 × f
• Application example
If the damping cycle is 100 ms or 20 ms, set 100 or 500
in the object so that the
damping frequency becomes
10 Hz or 50 Hz.
Command
speed
Position error
Calculate the
damping frequency.
Damping cycle T
1
T (s)
f (Hz)
=

 Loading...
Loading...




