SV-DA200 series AC servo drive Function codes
-102-
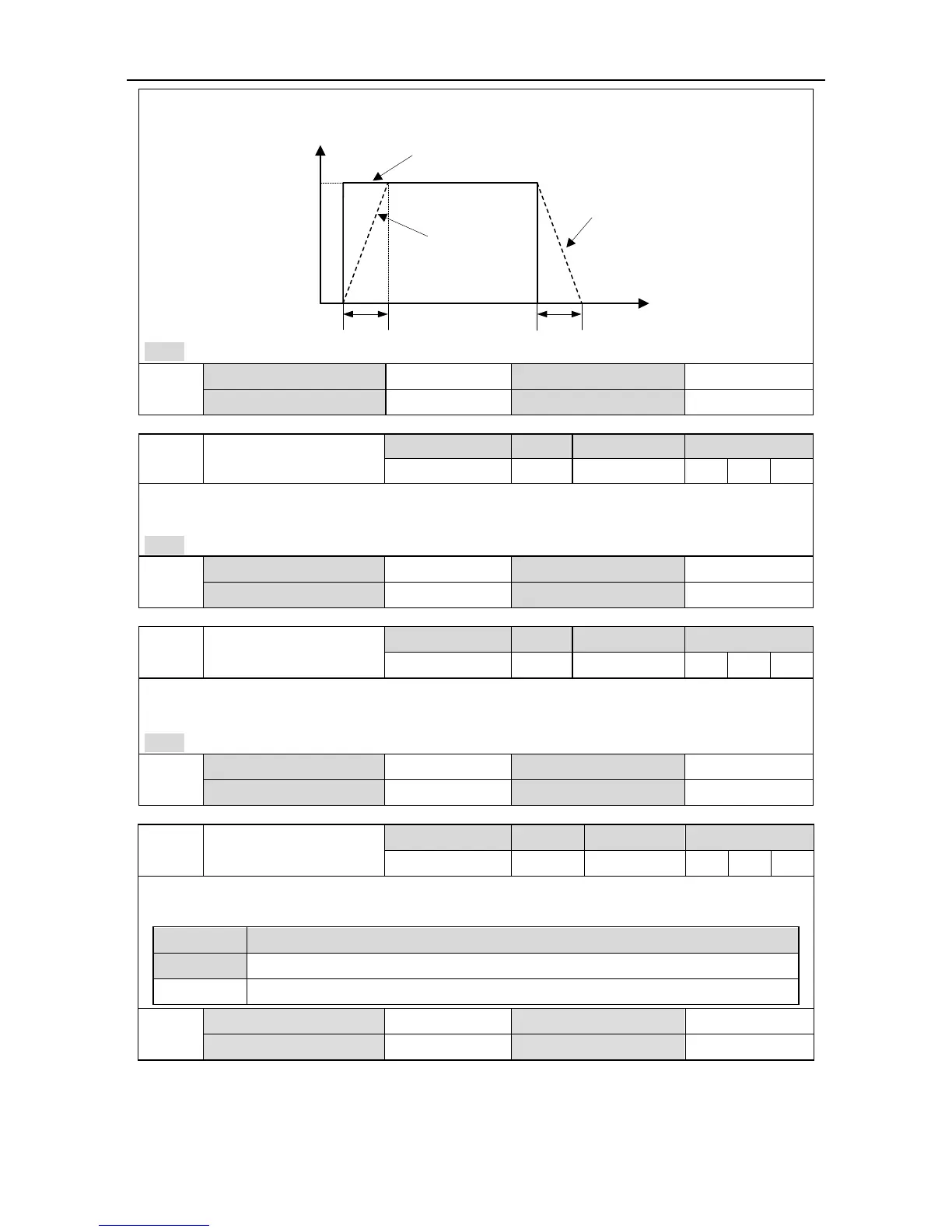
reduce the mechanical shock when the input pulse commands frequency changes. It is shown as
the figure below:
Position before filtering
Speed
Time
Position after filtering
Vc
Position after filtering
P0.34P0.34
Note: If the parameter is modified during the operation, it will be valid after stopping.
Software limit of forward
position control
This parameter is used to set the software limit of the forward position control.
When P0.35=0 and P0.36=0, the software limit will be invalid.
Note: The function is valid when the value defined by P0.35 is larger than P0.36.
Software limit of reverse
position control
This parameter is used to set the software limit of the reverse position control.
When P0.35=0 and P0.36=0, software limit will be invalid.
Note: The function is valid when it is less than P0.35.
This parameter is used to set the position command mode when P0.20 is set to 1 and it is invalid
for other modes.
Incremental (the position command input is the variation relative to current position)
Absolute(the position command input is the target position)

 Loading...
Loading...
