SV-DA200 series AC servo drive Function codes
-179-
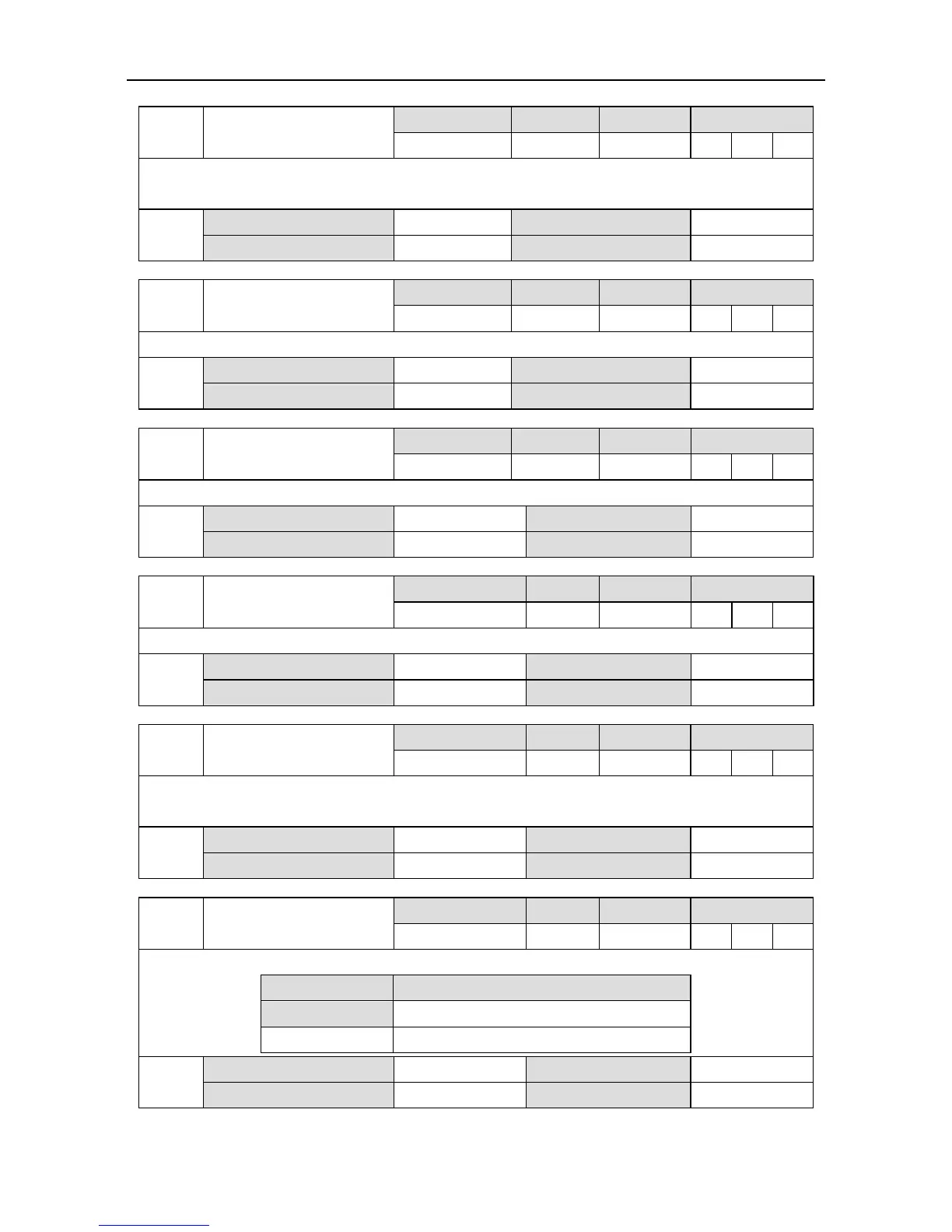
Gantry synchronous
speed control integral
This parameter is used to set the time constant of gantry synchronous speed control integral.
Please note that when this parameter is set to 1000, it means integral action is invalid.
Gantry synchronous
position control gain
This parameter is used to set the gantry synchronous position control gain.
Gantry synchronous
compensation torque filter
This parameter is used to set the time constant of gantry synchronous compensation torque filter.
Gantry synchronous
compensation speed filter
This parameter is used to set the time constant of gantry synchronous compensation speed filter.
Gantry synchronous
control bandwidth ratio
This parameter is used to set the gantry synchronous control bandwidth ratio: bandwidth
ratio=servo bandwidth/(servo bandwidth+synchronous bandwidth).
Gantry synchronization
master/slave selection
This parameter is used to set the gantry synchronization master/slave:

 Loading...
Loading...
