SV-DA200 series AC servo drive Function codes
-166-
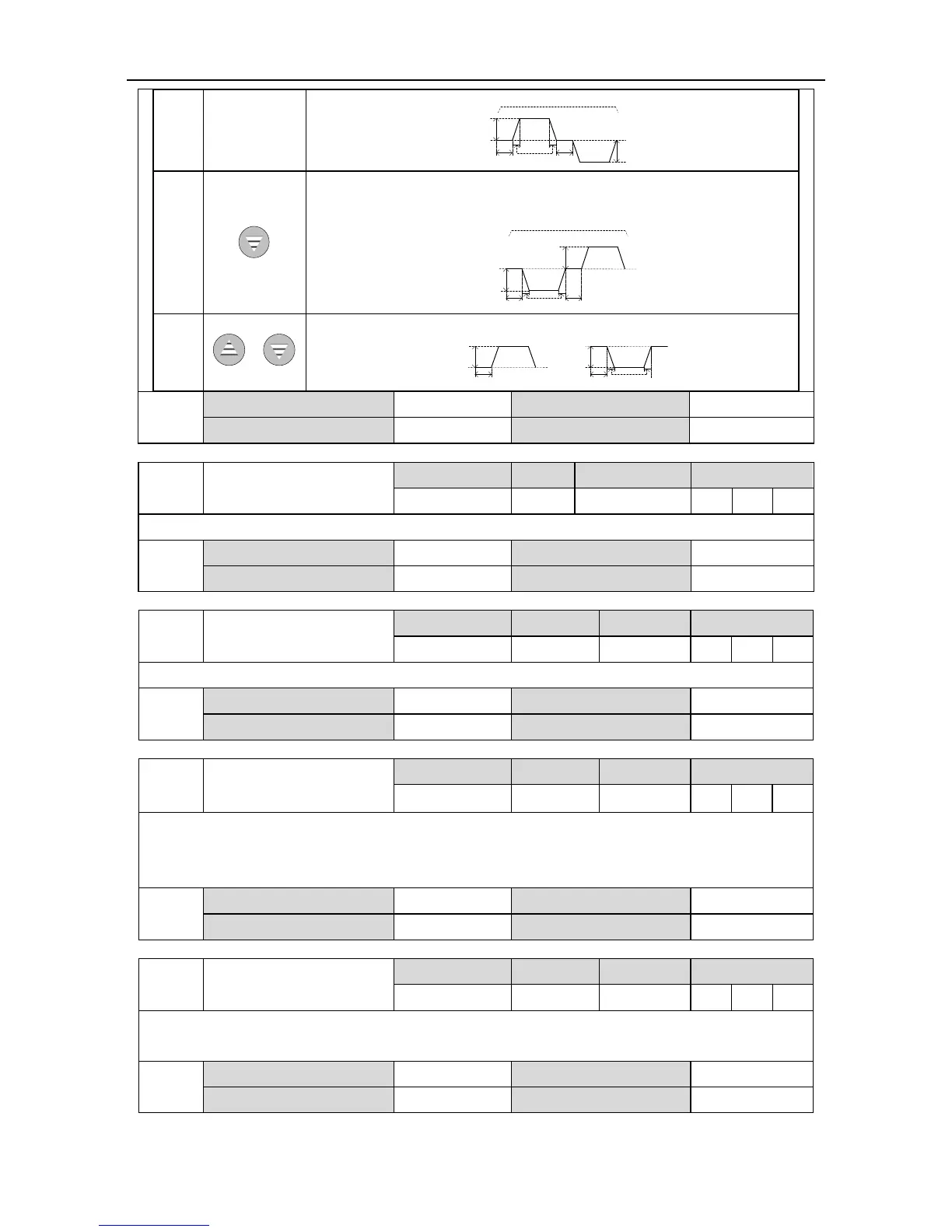
P5.02
P5.02
Speed 0
P5.04 P5.03 P5.04
P5.01
P5.05
P5.01
(waiting time P5.04→reverse moving P5.01→waiting time P5.04
→forward moving P5.01) × cycle time P5.05
P5.01
P5.02
Speed 0
P5.04 P5.04
P5.01
P5.03
P5.02
P5.05
(waiting time P5.04→forward or reverse moving P5.01) × cycle 1 time
P5.01
Speed 0
P5.04
P5.02
P5.02
Speed 0
P5.04
P5.01
P5.03
This parameter is used to set the increment of position movement amount of JOG.
This parameter is used to set the highest running speed of JOG.
This parameter is used to set the JOG ACC/DEC time and the time corresponds to the time from
zero speed to the rated speed. For example, if the target speed is from zero speed to 50% of the
rated speed, it is 50% of the time to the target speed.
This parameter is used to set JOG waiting time and the time is from JOG starting to actual operation
time or the time from the finishing of one displacement to the starting of next displacement.

 Loading...
Loading...
