SV-DA200 series AC servo drive Communication
-240-
current value of register independently. Finally, the value in the register is the CRC value after all
bytes in the frame are executed.
The calculation of CRC applies the international standard CRC checkout principles. When the user is
editing CRC calculation, he can refer to the relative standard CRC calculation to write the required
CRC calculation program.
8.2.6 Fault Responses
The slave uses functional code fields and fault addresses to indicate it is a normal response or some
error occurs (named as objection response). For normal responses, the slave shows corresponding
function codes, digital address or sub-function codes as the response. For objection responses, the
slave returns a code which equals the normal code, but the first byte is logic 1.
Example: When the master sends a message to the slave, requiring it to read a group of address
data of servo device function codes, there will be following function codes:
0 0 0 0 0 0 1 1 (Hex 03H)
For normal responses, the slave responds the same codes, while for objection responses, it will
return:
1 0 0 0 0 0 1 1 (Hex 83H)
Besides the function codes modification for the objection fault, the slave will respond a byte of
abnormal code which defines the error reason.
When the master receives the response for the objection, in a typical processing, it will send the
message again or modify the corresponding order.
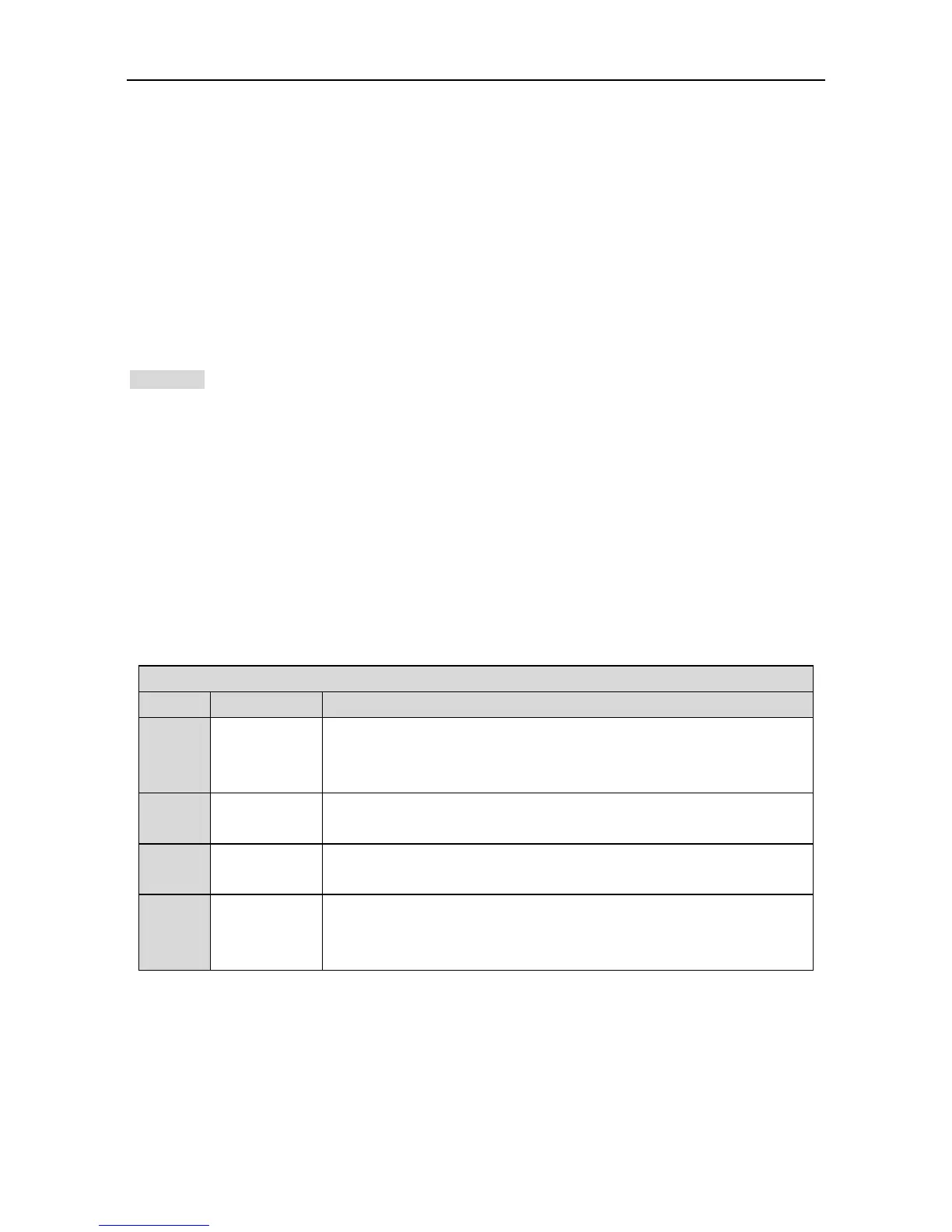
Table 8-6 Meaning of error code
In the frame message sent by the upper devices, if the CRC check bit of
RTU format or the LRC check bit of ASCII format is different from the
check number calculated by below devise, check error will be reported.
8.3 CANopen communication protocol
8.3.1 CANopen instructions
CANopen is the high level communication protocol on the control area network, includes the
applications communication agreement and equipment sub-agreement in embedded system. The
basic CANopen devices and sub communication protocols are in CAN in Automation (CiA) draft

 Loading...
Loading...
