SV-DA200 series AC servo drive Function codes
-126-
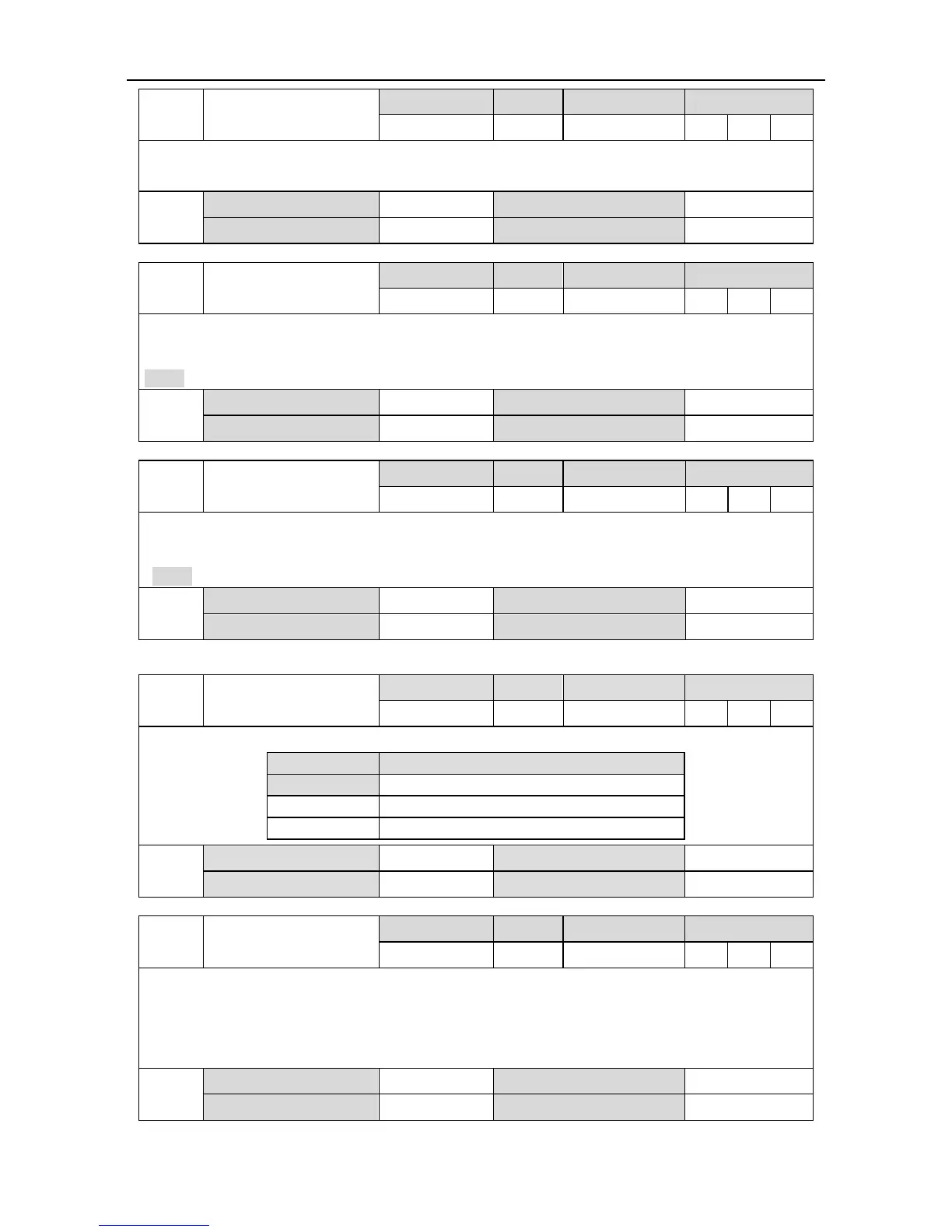
Delay time of torque
control switching
In torque control, if set P2.31 to 3, when switching from 2
nd
gain to 1
st
gain, it is the time from
meeting the trigger conditions to the actual switching.
Switching level of
torque control
In the torque control, if set P2.31 to 3, it is necessary to set trigger condition of gain switching.
The unit will vary with the mode and setting.
Note: Please set the level ≥ the delay
Switching delay of
torque control
In the torque control, if set P2.31 to 3, it is necessary to set switching conditions. The unit will vary
with the switching mode and setting.
Note: Please set the level<the delay, in the actual application, the delay=the level
6.3.3 Special motor control
Disturbances observer
valid
Set whether the disturbance observer is valid or not via this parameter.
Disturbance observer
compensation gain
This parameter is used to set the compensation gain of disturbance torque. Increasing the gain
may improve the effect of suppressing disturbance impact but the noise may enhanced; it is
necessary to use with P2.43 to find the best setting point. After setting P2.43, please increase the
set value of P2.42.

 Loading...
Loading...
