SV-DA200 series AC servo drive Running and operation
-82-
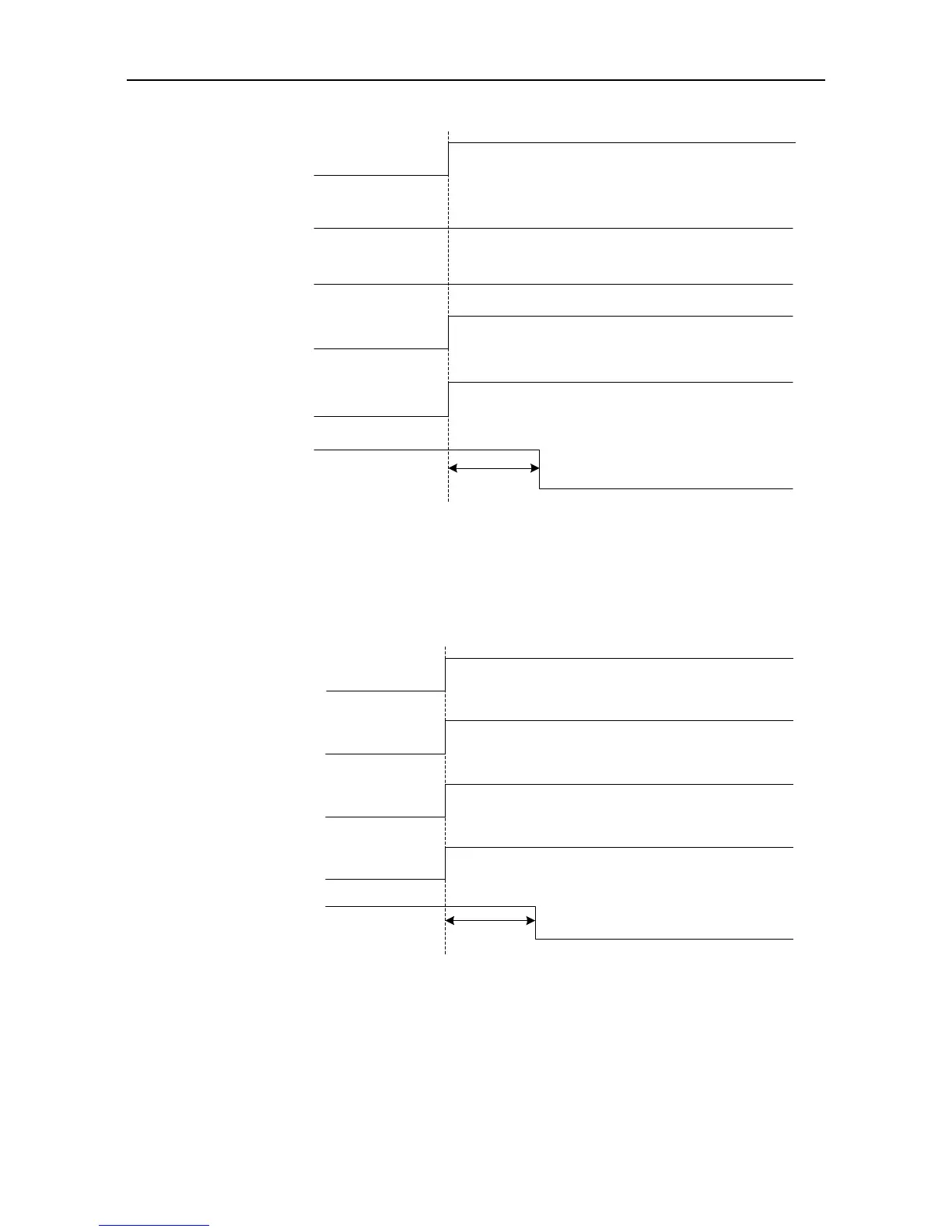
5.1.9.4 Servo OFF sequence in running state
Dynamic brake state
PWM output
Electromagnetic
brake release signal
output (BRK)
Servo ready output
(RDY)
Servo fault output
(ALM)
Servo enabling (SON)
Note 1: The switch on/off of the dynamic brake can be controlled by P4.30;
Note 2: The output delay of electromagnetic brake release signal is set by P3.57; if the speed is less than
the setting value of P3.58 during the time of P3.57, the BRK signal will become invalid;
Note 3: The actual electric level corresponding to input/output valid state can be set by P3.00~P3.15.
No fault alarm
Servo has output
Motor brakeMotor brake-release
Servo has no output
Dynamic brake switches onNote 1
Note 2
Enable Disabled
Valid
Dynamic brake
switches off
Note 3
5.1.9.5 Sequence of fault alarm
Dynamic brake state
PWM output
Electromagnetic
brake release signal
output (BRK)
Servo ready output
(RDY)
Servo fault output
(ALM)
Note 1: The switch on/off of the dynamic brake can be controlled by P4.30;
Note 2: The output delay of electromagnetic brake release signal is set by P3.57; if the speed is less than
the setting value of P3.58 during the time of P3.57, the BRK signal will become invalid;
Note 3: The actual electric level corresponding to input/output valid state can be set by P3.00~P3.15.
Fault alarm
Servo has output
Motor brakeMotor brake-release
Servo has no output
Dynamic brake switches onNote 1
Note 2
Dynamic brake
switches off
Normal
Valid Invalid
Note 3

 Loading...
Loading...
