SV-DA200 series AC servo drive Function codes
-94-
This parameter can be used to set the jog speed. For jogging, please refer to chapter 5.2.5.2
During jogging, the ACC/DEC time parameters (P0.54, P0.56, P0.55, and P0.57) are active. The
motor will accelerate, decelerate, start and stop according to the settings.
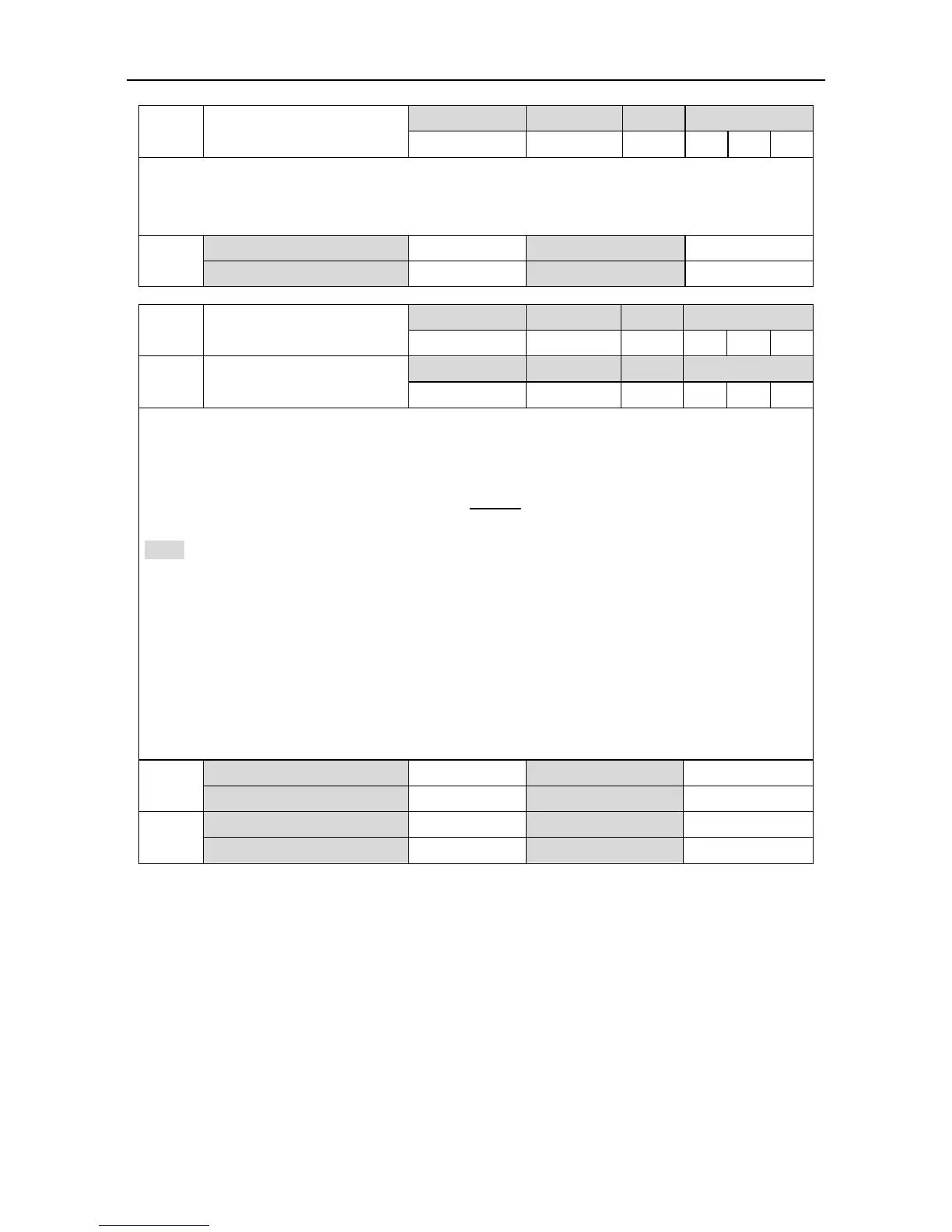
Numerator of frequency
division output coefficient
Denominator of frequency
division output coefficient
By setting the numerator and denominator of the frequency division output, the signal of the
encoder can be frequency divided by any integer or decimal fraction and then outputted through
the encoder’s pulse output signal terminals(OA+, OA-, OB+ and OB- pin “44”“43”“41” and “42”)
Number of drive output pulse=
P0.06
P0.07
X encoder resolution
Note:
1. In the position control mode, if the encoder output signal of the preceding stage servo motor is
used as the position pulse command input of the succeeding stage servo drive, i.e. as start/stop
type master-slave follow-up, in order to ensure high positioning accuracy of the succeeding stage
servo drive, the frequency division coefficient must be 1:1. Otherwise the accuracy of
master-slave position follow-up will be affected in this case.
2. In factory setting, P0.07 is 131072, P0.06 is 10000, which means the output terminal of the
encoder will output 10000 pulse signal when the motor rotates a circle. If P0.06 is 5000, the
output terminal of the encoder will output 5000 pulse signal.

 Loading...
Loading...
