SV-DA200 series AC servo drive Function codes
-93-
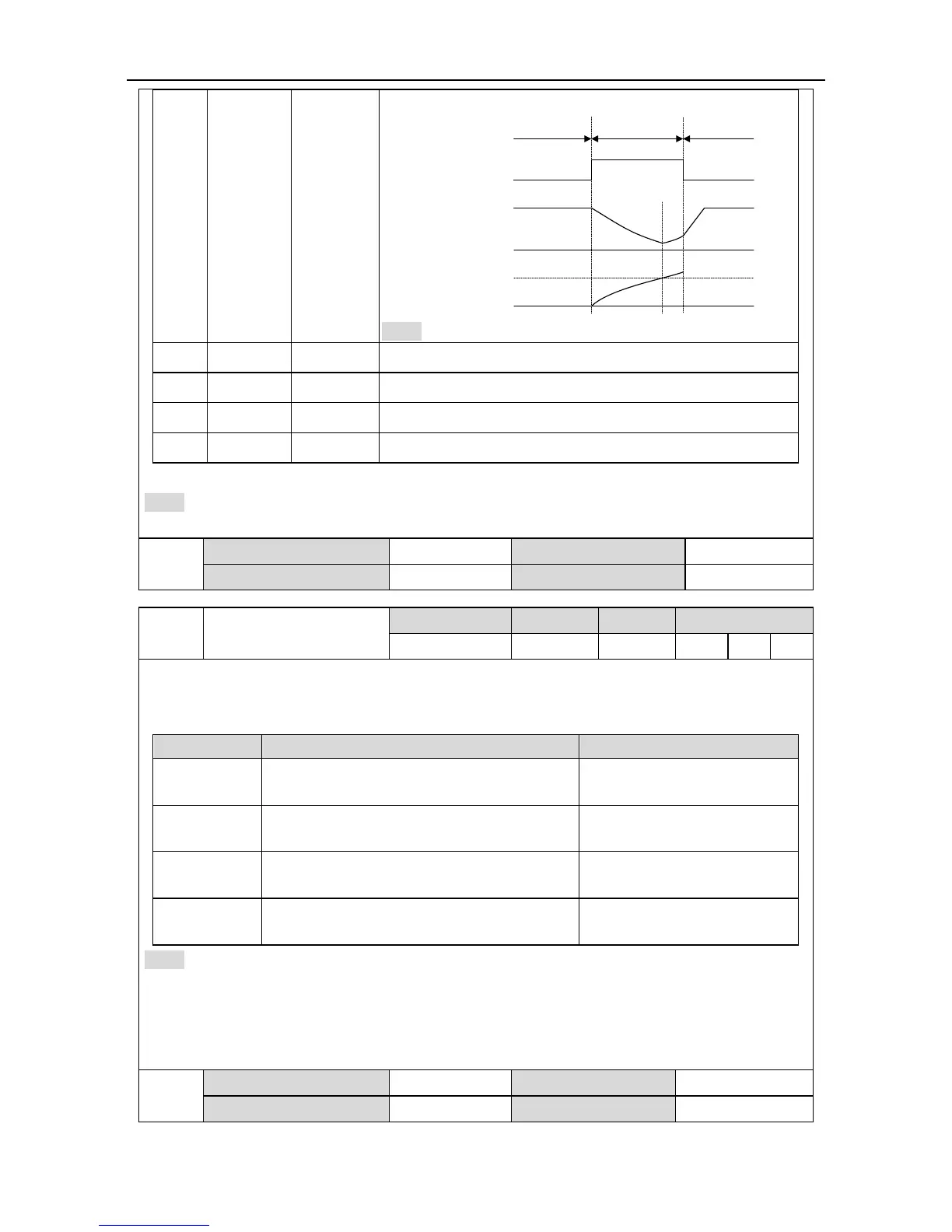
be switched with control mode switching terminal
ON
OFF
Torque command
Load torque
Torque modeSpeed mode Speed mode
Motor speed
Mode switching
signal (MCH)
Note: The switching mode is not limited by actual operation.
CANopen mode (CANopen type servo support)
EtherCAT mode (EtherCAT type servo support)
MotionNet mode (MotionNet type servo support)
Remark: Set P0.03 and P3.00–P3.09 will switch automatically according to the selected control mode.
Note:0:OFF (internal optical coupler corresponding to the input is not conducted);
1:ON (internal optical coupler corresponding to the input is conducted).
Internal enabling
command
This parameter is used to control the operation state of the servo drive.
The relation between internal enable instruction and external terminal enable instruction is shown
below:
External terminal command state
Working state of servo drive
0 (internal optical coupler which corresponds
to the input is not conducted)
1(internal optical coupler which corresponds
to the input is conducted)
0 (internal optical coupler which corresponds
to the input is not conducted)
1 (internal optical coupler which corresponds
to the input is conducted)
Note:
1. When P0.04 is 1 and the external terminal command converts from 1 to 0, the servo drive will
be disabled, namely P0.04 will change to 0 automatically.
2. When this parameter is operated via the LED panel, it can only be switched between 0 and 1
via SET key and UP/DOWN key is invalid under the setup interface of this parameter.

 Loading...
Loading...
