SV-DA200 series AC servo drive Function codes
-99-
Pulse number per motor
resolution
This parameter is used to set the number of pulses per motor resolution.
Note: P0.22 is set to a non-zero value, the setting of P0.25–P0.29 is invalid. If 17-bit and 20-bit
encoder is used, the more pulse number can be set for the higher precision.
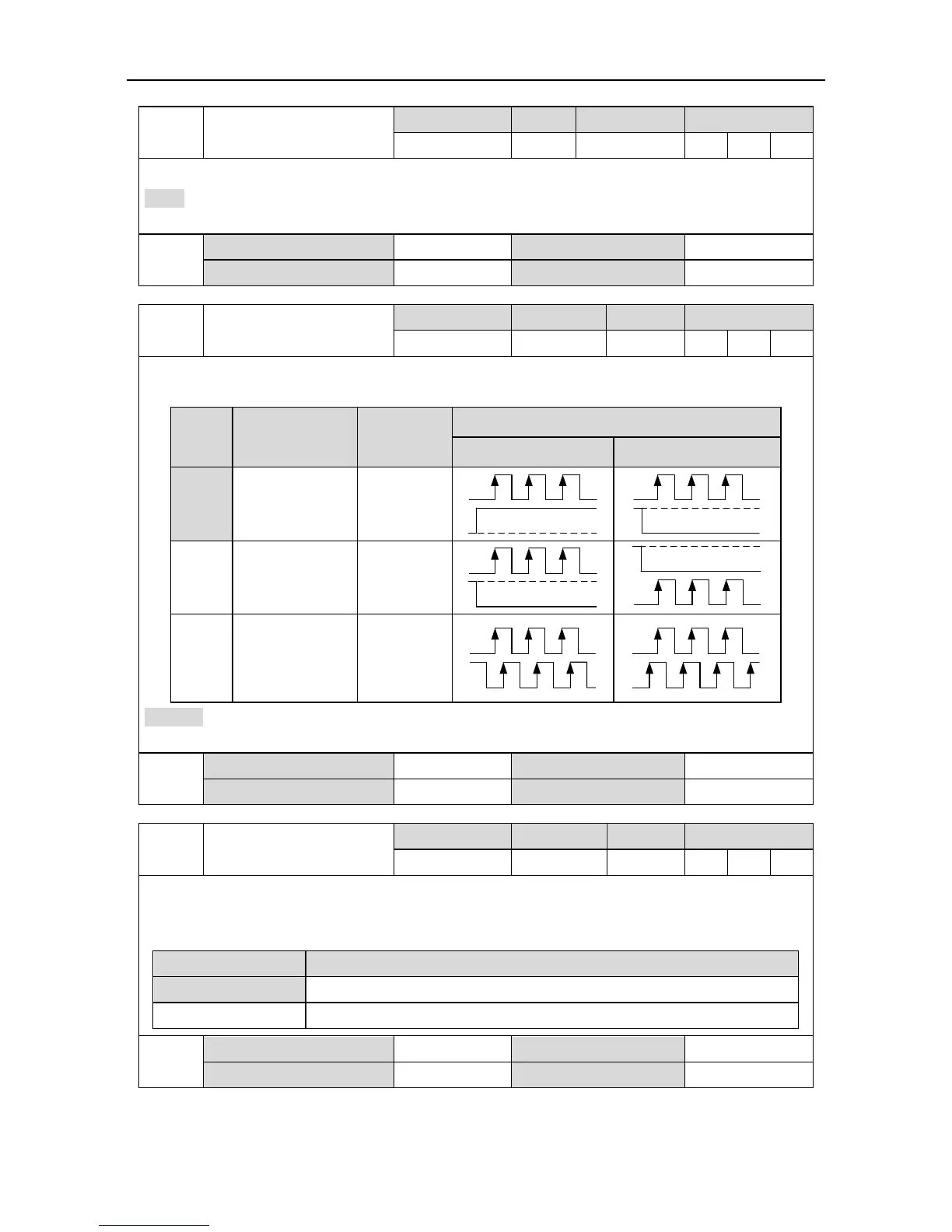
This parameter is used to set the manner of pulse input.
There are 3 types of pulse input manners:
Quadrature
encoder pulse
mode
Remark: The pulse direction of the parameter can be reversed by P0.24
1
. Please refer to P0.24
1
for detailed information.
Reverse of pulse input
direction
By setting this parameter, the direction of the input pulse can be reversed. At this time the actual
output speed direction of the servo drive is opposite to the direction indicated by the pulse input
form in P0.23.
Pulse input direction does not change
Pulse input direction is opposite to the original input direction

 Loading...
Loading...
