SV-DA200 series AC servo drive Function codes
-95-
Reverse of frequency
division output
The reverse of B phase can be carried out through this parameter and the phase relation
between A phase and B phase can be changed:
Torque limit mode setting
This parameter is used to set the torque limit mode.
Torque limit (analog input 0V–10V)
Torque limit (analog input -10V to +10V)
Max. torque limit 1 (P0.10)
Max. torque limit 1(P0.10)
Max. torque limit 2(P0.11)
TLC OFF →Max. torque limit 1(P0.10)
TLC ON → Max. torque limit 2(P0.11)
Forward torque limit
(analog input 0V–10V)
Negative torque limit
(analog input 0V–10V)
Forward torque limit (analog input 0V–10V)
Torque command (analog input 0V–10V)
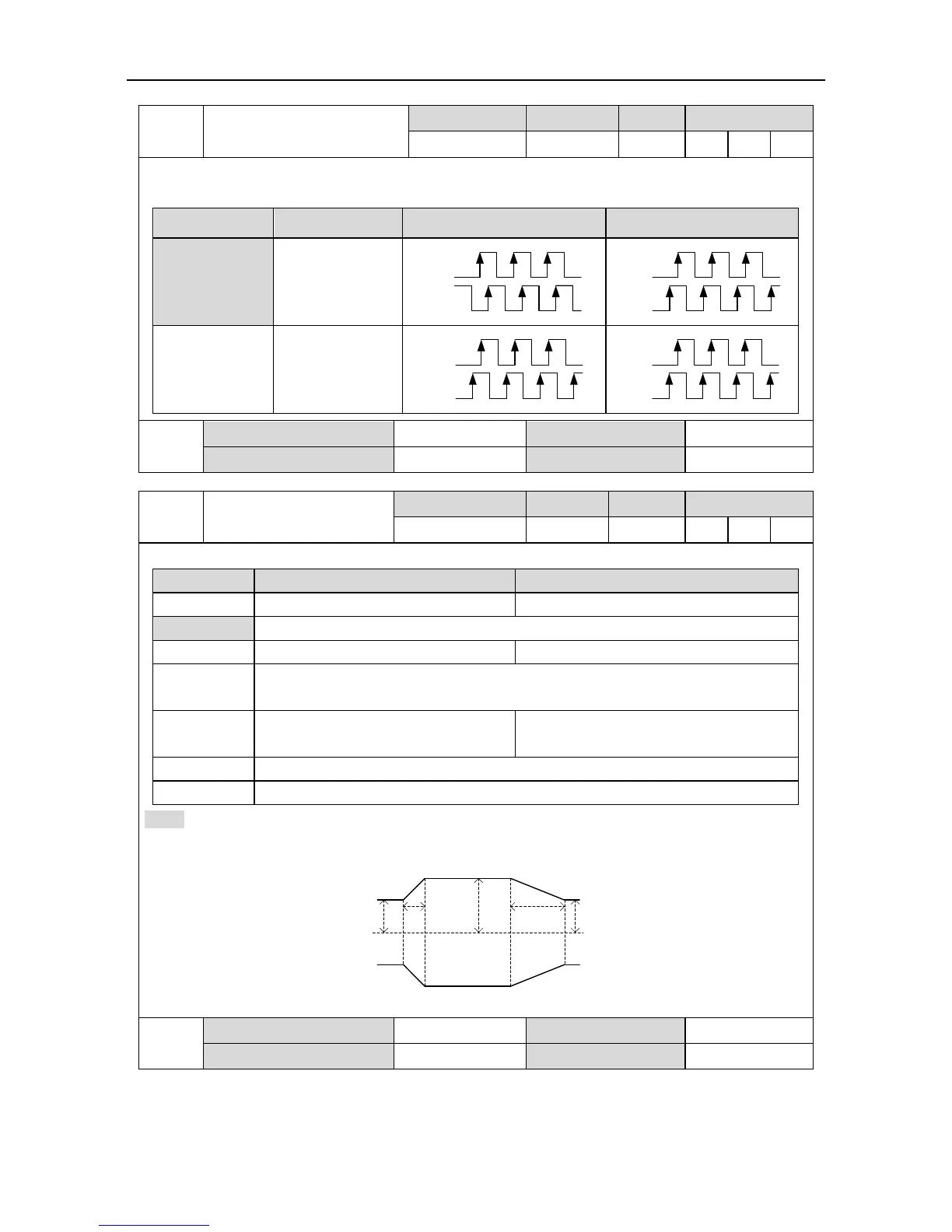
Note: If P0.09 is 3, the torque switching will not become effective instantly and will be limited by
P4.51 and P4.52, the detailed information is shown in the figure below:
P0.10
P0.11
0
torque
Ta Tb
P0.10
Ta[ms]=|P0.11[%]-P0.10[%]|×P4.51[ms/100%]/100
Tb[ms]=|P0.10[%]-P0.11[%]|×P4.52[ms/100%]/100

 Loading...
Loading...
