4-5
4 Checking Wiring from the Sysmac Studio
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
4-1 Functions of the Sysmac Studio
4
4-1-3 Axis Parameter Setting Example
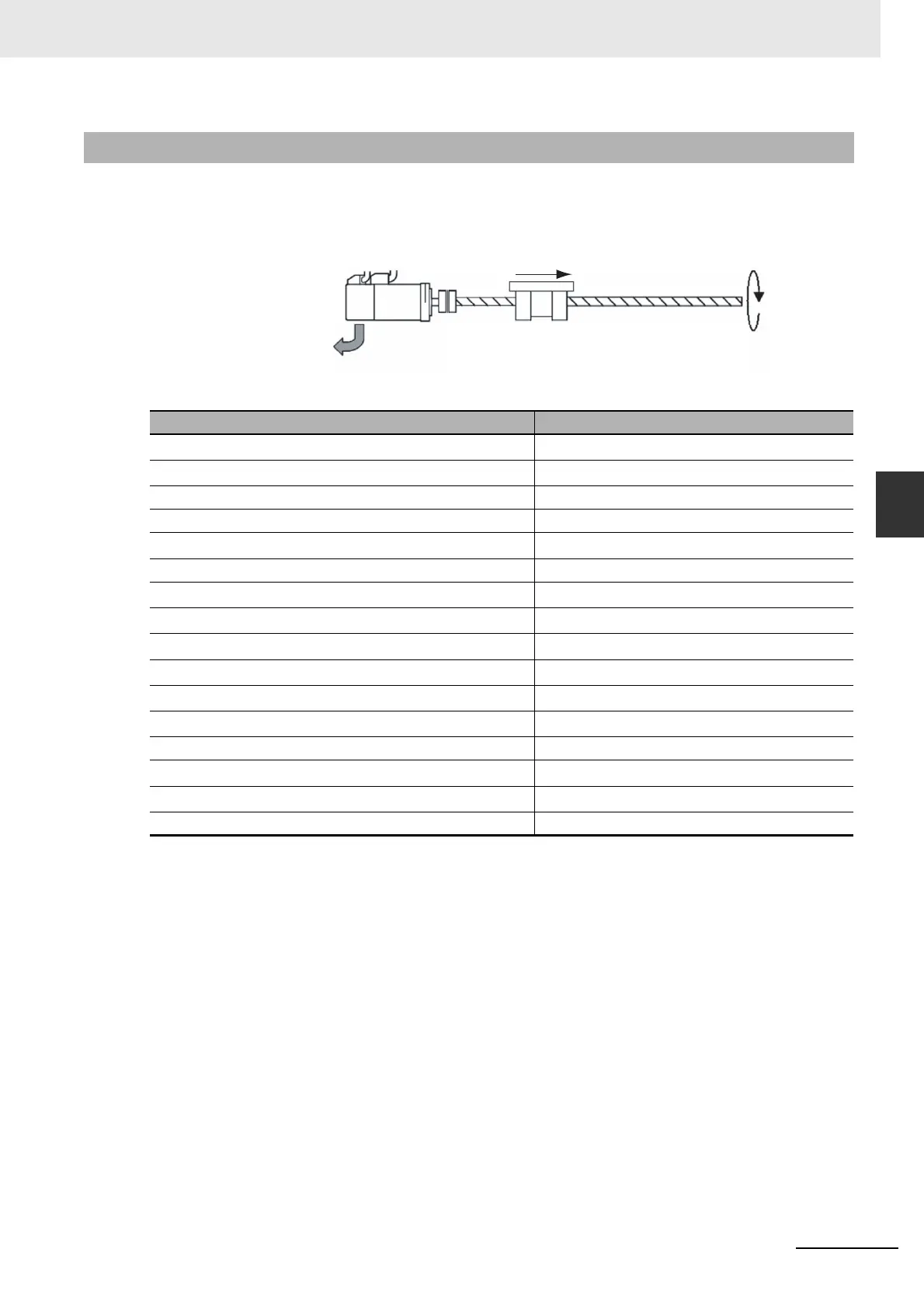
Set the following axis parameters before you execute the MC Test Run Mode in the Sysmac Studio.
The following setting example is for a one-axis device.
*1 If there is more than one axis, a different variable name is set for each axis.
*2 If there is more than one axis, a different value is set for each axis.
*3 Set the same node address as for the Servo Drive.
If there is more than one axis, a different value is set for each axis.
*4 The position command unit will be 1 μm.
*5 The maximum velocity will be 3,000 r/min = 30 m/min = 0.5 m/s = 500,000 μm/s.
*6 The maximum jog velocity will be 10% of the maximum velocity, i.e., 0.05 m/s = 50,000 μm/s.
*7 The maximum acceleration and the maximum deceleration will be 5 m/s
2
.
The acceleration time to the maximum velocity (3,000 r/min) will be 0.1 s.
*8 Set a value that is within the movable range of the device.
The positive software limit is set to 50 cm = 500,000 μm.
4-1-3 Axis Parameter Setting Example
Parameter name Setting
Axis Variable Name
Axis1
*1
Axis Number
1
*2
Axis Use Used axis
Axis Type Servo axis
Input Device/Output Device
1
*3
Unit of Display μm
Command Pulse Count Per Motor Rotation
1,048,576
*4
Work Travel Distance Per Motor Rotation
10,000
*4
Maximum Velocity
500,000
*5
Maximum Jog Velocity
50,000
*6
Maximum Acceleration
5,000,000
*7
Maximum Deceleration
5,000,000
*7
Software Limits Immediate stop for command position
Positive Software Limit
500,000
*8
Negative Software Limit
0
*8
Count Mode Linear Mode
Ball screw
Ball screw pitch: 10 mm
1 rotation
Encoder resolution: 20 bits/rotation
20 bits = 1,048,576
Encoder Output Pulse Count per Motor Rotation
Servomotor
10 mm

 Loading...
Loading...







