9-37
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-5 Common Functions for Single-axis Control
9
9-5-4 Jerk
If you specify a short travel distance or a low acceleration/deceleration rate, the target velocity may not
be reached. If the target position is exceeded after re-execution of the motion control instruction with
the newly updated acceleration or deceleration rate, positioning is performed at an acceleration or
deceleration rate that will enable stopping at the target position.
The jerk specifies the rate of change in the acceleration rate or deceleration rate. If the jerk is specified,
the velocity waveform during acceleration will be an S-curve, which will reduce the shock and vibration
on the machine.
Jerk is also called jolt, surge and lurch.
Jerk is given in command units/s
3
. The command unit is the value obtained from unit conversion of the
position display unit and the electronic gear.
The jerk used in an actual positioning motion is specified with the Jerk input variable to the motion con-
trol instruction. The same value is used for acceleration and deceleration.
Use the following formula to calculate the value to set for the jerk.
Jerk = Acceleration rate ÷ (Time of acceleration × Ratio of time to apply jerk during acceleration/2)
Jerk is applied in two sections: at the start of acceleration and at the end of acceleration. The time that
jerk is applied is therefore divided by 2.
Example of Velocity Control When Jerk Is Specified
The acceleration will change at a constant rate over the range where jerk is specified. The command
velocity will form a smooth S curve. A fixed acceleration rate is used in areas where the jerk is set to
0. This command velocity will form a straight line.
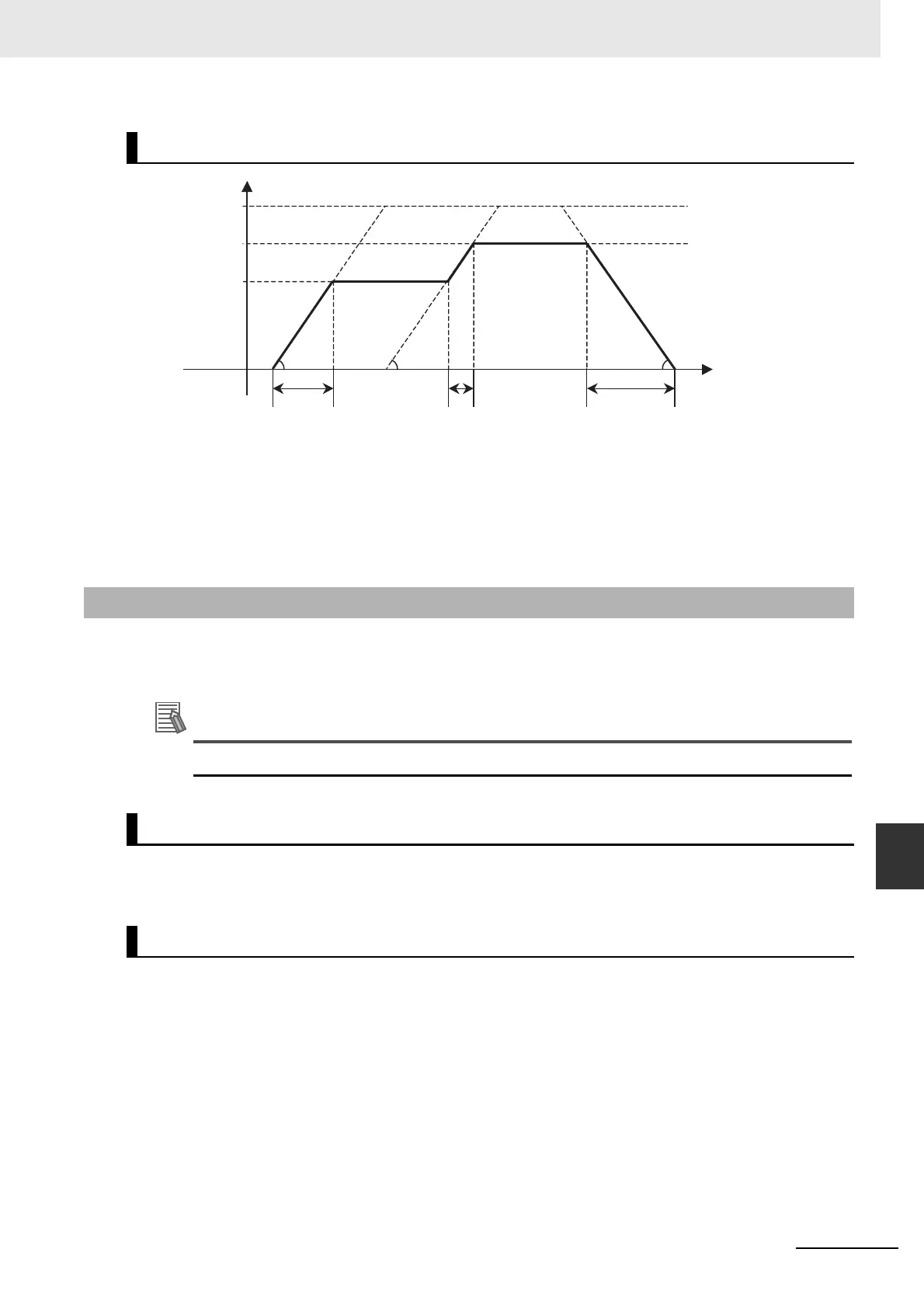
Example of Acceleration/Deceleration Operation
9-5-4 Jerk
Jerk Unit
Specifying Jerk for Axis Motion
A
A
D
Ta2 Td
Ta1
Ta1: Actual acceleration time
A: Acceleration rate
When Starting
Ta2: Actual acceleration time
A: Acceleration rate
For Velocity Changes
Td: Actual deceleration time
D: Deceleration rate
When Decelerating
Time
Velocity
(1) Target velocity
at startup
(2) Target velocity
after velocity
change
Maximum velocity

 Loading...
Loading...







