9-29
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-3 Single-axis Velocity Control
9
9-3-1 Velocity Control
9-3 Single-axis Velocity Control
This section describes the operation of velocity control for single axes.
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for the differences when
you use NX-series Pulse Output Units.
Velocity control is used to constantly move an axis at the specified velocity. You can also specify the
acceleration rate, deceleration rate, and jerk. To stop an axis, use the MC_Stop instruction or execute
another motion instruction. If you specify a target velocity of 0, the axis will not move but the axis status
will indicate that it is moving. If any other motion control instruction is executed with multi-execution of
instructions during velocity control, the operation will switch only after reaching the target velocity.
The MC Function Module uses Position Control Mode of the Servo Drive or other device and sends tar-
get position commands to achieve the specified target velocity.
The position control loop is enabled in the Servo Drive or other device. Therefore, as the command
velocity slows down, e.g., due to disturbance, and the following error increases, the velocity will change
to eliminate this following error.
For details, refer to the MC_MoveVelocity (Velocity Control) instruction in the NJ/NX-series Motion Con-
trol Instructions Reference Manual (Cat. No. W508).
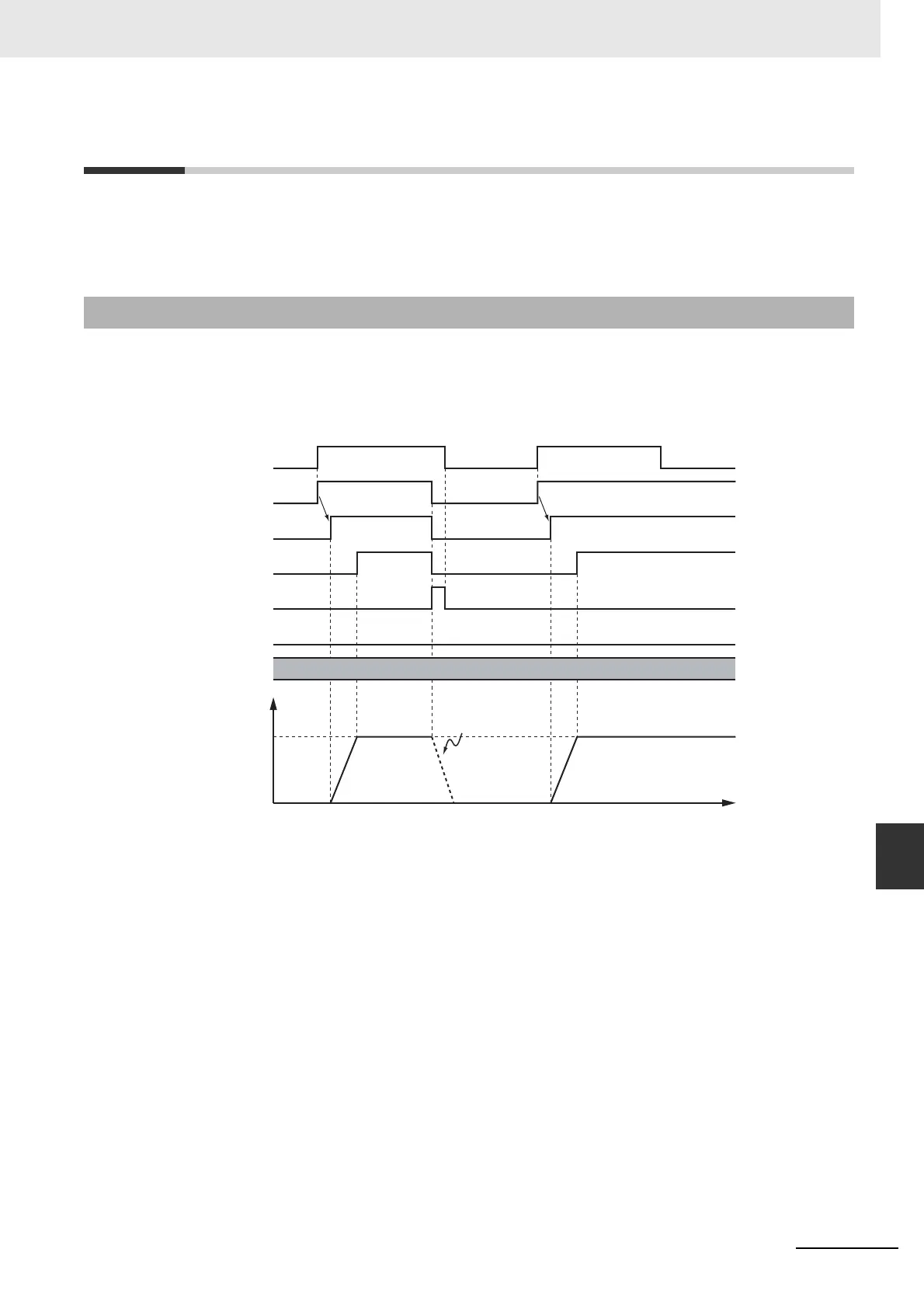
9-3-1 Velocity Control
Time
Decelerates to a stop
when another instruction
causes an error.
Target velocity
Velocity
Busy
CommandAborted
InVelocity
Error
16#0000
ErrorID
Execute
Active

 Loading...
Loading...







