5 Motion Control Parameters
5-20
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
These parameters set items for axis operation, such as the maximum velocity and maximum accelera-
tion/deceleration rate. Set them according to the specifications of the device you are controlling.
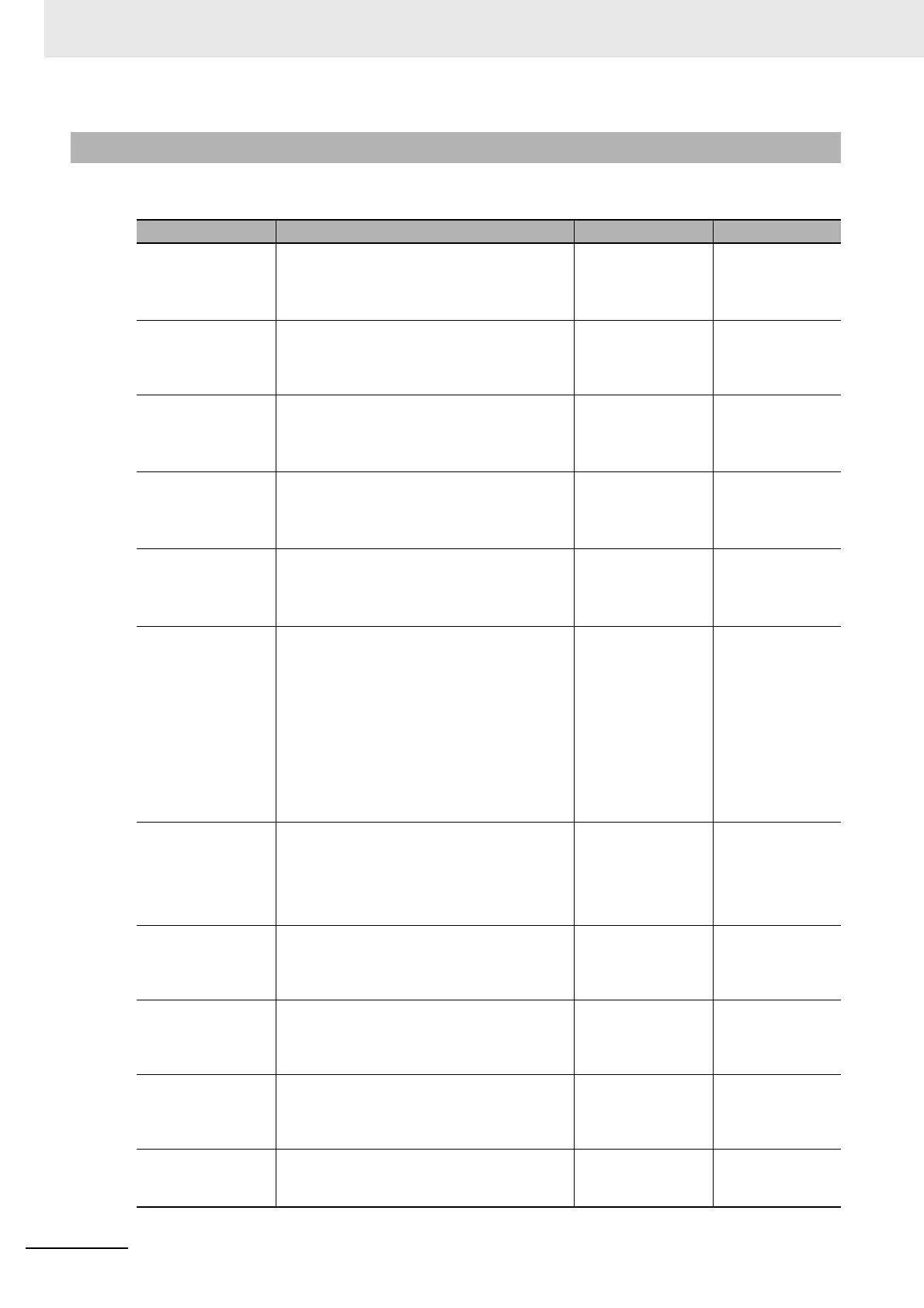
5-2-4 Operation Settings
Parameter name Function Setting range Default
Maximum Velocity
Set the maximum velocity for each axis.
*1
Do not set a value that exceeds the maximum
speed of the motor that you are using.
(Unit: command units/s)
Positive long reals
*2
400,000,000
Start Velocity
*3
Set the start velocity for each axis.
Set a value that does not exceed the maxi-
mum velocity.
(Unit: command units/s)
Positive long reals 0
Maximum Jog
Velocity
Set the maximum jog velocity for each axis.
*4
Set a value that does not exceed the maxi-
mum velocity.
(Unit: command units/s)
Positive long reals 1,000,000
Maximum Accelera-
tion
Set the maximum acceleration rate for an axis
operation command. There will be no limit to
the acceleration rate if 0 is set. (Unit: com-
mand units/s
2
)
Non-negative long
reals
0
Maximum Decelera-
tion
Set the maximum deceleration rate for an axis
operation command. There will be no limit to
the deceleration rate if 0 is set. (Unit: com-
mand units/s
2
)
Non-negative long
reals
0
Acceleration/Decel-
eration Over
Set the operation for when the maximum
acceleration/deceleration rate would be
exceeded after excessive acceleration/decel-
eration during acceleration/deceleration con-
trol of the axis because stopping at the target
position is given priority.
0: Use rapid acceleration/deceleration.
(Blending is changed to Buffered.)
*5
1: Use rapid acceleration/deceleration.
2: Minor fault stop
*6
0 to 2 0
Operation Selection
at Reversing
Specify the operation for reversing rotation for
multi-execution of instructions, re-execution of
instructions, and interrupt feeding.
*7
0: Deceleration stop
1: Immediate stop
0 to 1 0
Velocity Warning
Value
Set the percentage of the maximum velocity at
which to output a velocity warning for the axis.
No velocity warning is output if 0 is set. (Unit:
%)
0 to 100 0
Acceleration Warn-
ing Value
Set the percentage of the maximum accelera-
tion rate at which to output an acceleration
warning for the axis. No acceleration warning
is output if 0 is set. (Unit: %)
0 to 100 0
Deceleration Warn-
ing Value
Set the percentage of the maximum decelera-
tion rate at which to output a deceleration
warning for the axis. No deceleration warning
is output if 0 is set. (Unit: %)
0 to 100 0
Positive Torque
Warning Value
*8
Set the torque command value at which to
output a positive torque warning. No positive
torque warning is output if 0 is set. (Unit: %)
0 to 1,000 0

 Loading...
Loading...







