9 Motion Control Functions
9-14
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
For details on gear operation, refer to the MC_GearIn (Start Gear Operation), MC_GearOut (End Gear
Operation), and MC_Stop instructions in the NJ/NX-series Motion Control Instructions Reference Man-
ual (Cat. No. W508).
This function specifies the gear ratio between the master axis and the slave axis and starts operation.
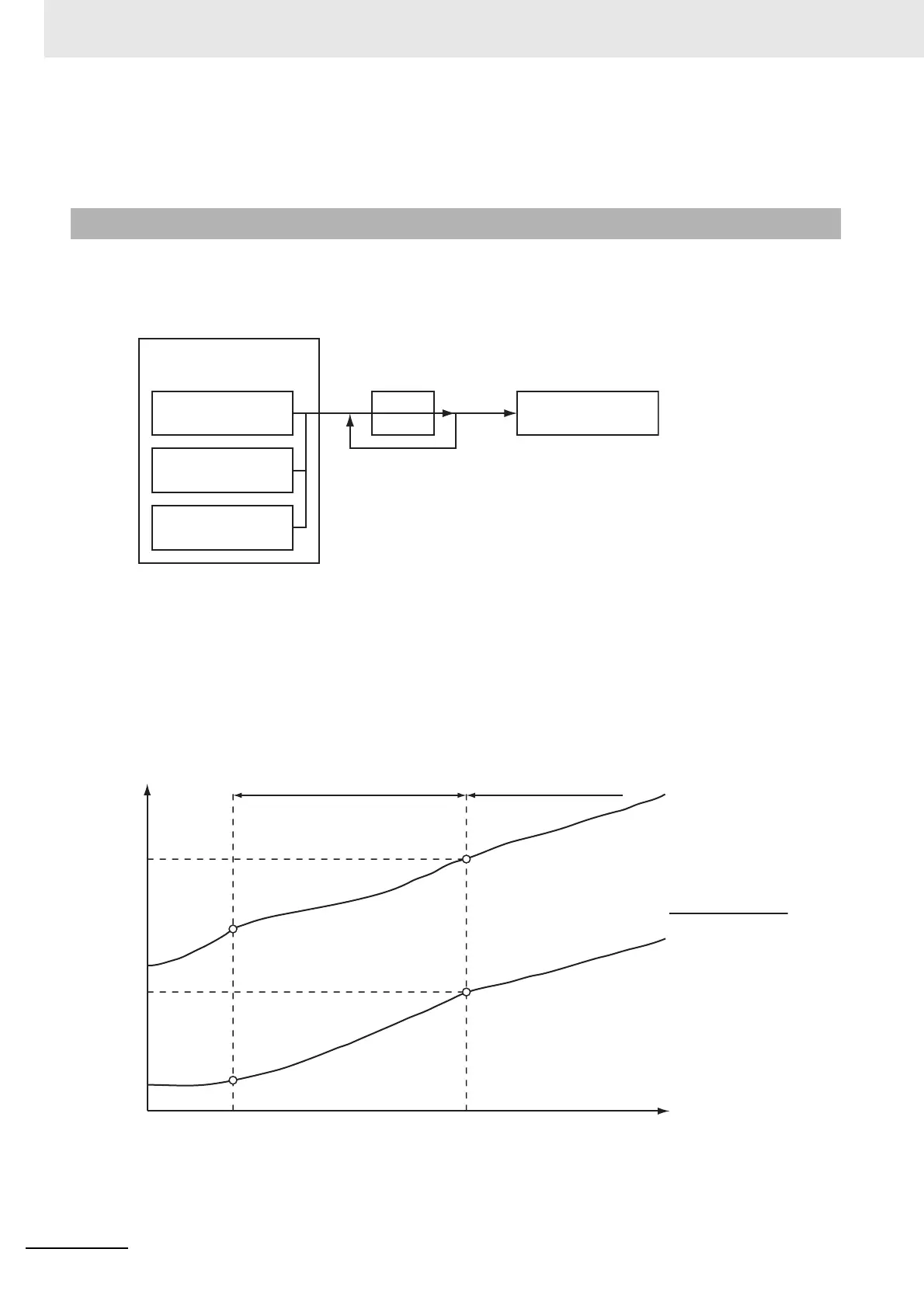
Positioning gear operation allows you to set the positions of the master and slave axes at which to start
synchronization. Start positioning gear operation with the MC_GearInPos instruction. End synchroniza-
tion with the MC_GearOut instruction or the MC_Stop instruction.
You can set the gear ratio numerator, gear ratio denominator, position type, acceleration rate, and
deceleration rate for the slave axis to operate. For the master axis, you can specify the command posi-
tion, actual position, or most recent command position.
After operation starts, the slave axis uses the velocity of the master axis times the gear ratio for its tar-
get velocity, and accelerates/decelerates accordingly. The slave axis is in the catching phase until it
reaches the slave sync position. The slave axis enters the InSync phase after it reaches the slave sync
position. For either, the position of the slave axis is synchronized with the master axis. If the gear ratio
is positive, the slave axis and master axis move in the same direction. If the gear ratio is negative, the
slave axis and master axis move in the opposite directions. The following figure shows the operation
when the gear ratio is positive.
For details on positioning gear operation, refer to the MC_GearInPos (Positioning Gear Operation), the
MC_GearOut (End Gear Operation), and the MC_Stop instructions in the NJ/NX-series Motion Control
Instructions Reference Manual (Cat. No. W508).
9-2-3 Positioning Gear Operation
Command position
Remainder
Denominator
Numerator
Gear Operation
Most recent command
position
Command position
Actual position
Specify with
ReferenceType.
Execute
Catching Phase InSync phase
Master
Slave
RatioDenominator
RatioNumerator
Time
Travel distance of slave axis
= Travel distance of master axis ×
Position

 Loading...
Loading...







