8-5
8 Homing
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
8-2 Homing Procedure
8
8-2-1 Setting Homing Parameters
8-2 Homing Procedure
This section describes the procedure to perform homing.
1
Adding and Setting an Axis
Add and set an axis from the Sysmac Studio.
2
Setting Axis Parameters
Set the homing method with the homing parameters.
3
Writing the User Program
Create the user program from the Sysmac Studio. For details, refer to 6-8 Programming Motion
Controls.
4
Downloading Axis Parameters and the User Program
Download the axis parameters and user program to the CPU Unit. Use the Synchronization
menu command of the Sysmac Studio to download the project to the CPU Unit.
For details, refer to 3-2-2 Setting Procedure.
5
Executing the User Program
Execute the user program and change the Enable input variable for MC_Power to TRUE to
change the Servo Drive to the Servo ON state. Homing is performed when the Execute input
variable to the MC_Home or MC_HomeWithParameter instruction changes to TRUE.
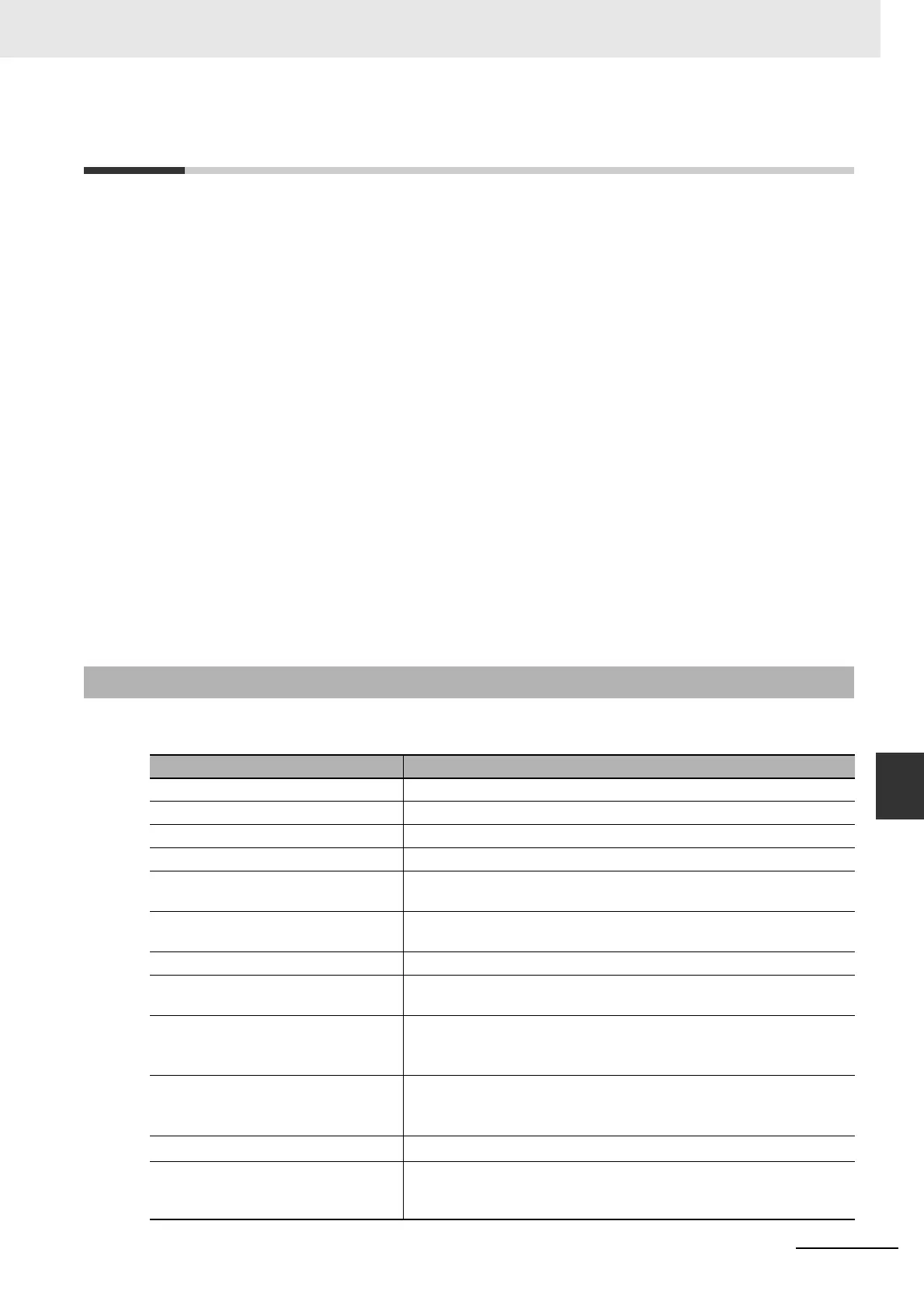
Set the homing parameters to specify the homing procedure. Set the homing parameters from the Sys-
mac Studio.
8-2-1 Setting Homing Parameters
Parameter name Description
Homing Method Set the homing operation.
Home Input Signal Select the input to use for the home input signal.
Homing Start Direction Set the start direction for when homing is started.
Home Input Detection Direction Set the home input detection direction for homing.
Operation Selection at Positive Limit
Input
Set the stopping method when the positive limit input turns ON during
homing.
Operation Selection at Negative Limit
Input
Set the stopping method when the negative limit input turns ON during
homing.
Homing Velocity Set the homing velocity. (Unit: command units/s)
Homing Approach Velocity Set the velocity to use after the home proximity input turns ON. (Unit:
command units/s)
Homing Acceleration Set the acceleration rate for homing. If the homing acceleration is set to
0, the homing velocity or other target velocity is used without any accel-
eration. (Unit: command units/s
2
)
Homing Deceleration Set the deceleration rate for homing. If the homing deceleration is set to
0, the homing approach velocity or other target velocity is used without
any deceleration. (Unit: command units/s
2
)
Homing Jerk
Set the jerk for homing. Set 0 for no jerk. (Unit: command units/s
3
)
Home Input Mask Distance Set the home input feeding distance when you set the Homing Opera-
tion Mode to the proximity reverse turn/home input mask distance.
(Unit: command units)

 Loading...
Loading...







