9-31
9 Motion Control Functions
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
9-4 Single-axis Torque Control
9
9-4 Single-axis Torque Control
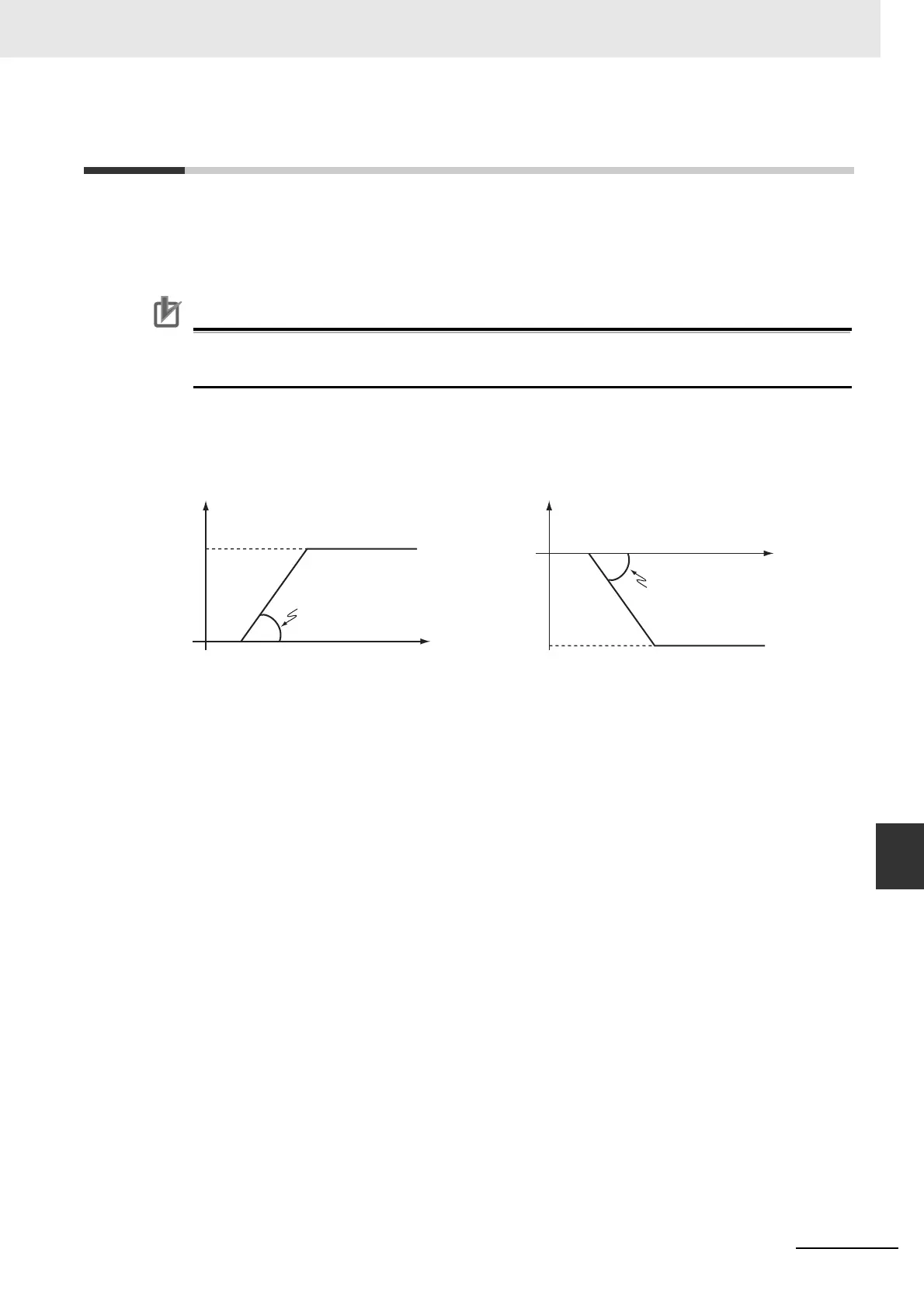
Torque control continuously applies the specified amount of torque. You can use TorqueRamp to spec-
ify the rate of change of the torque until the Torque (Target Torque) is reached. To stop an axis, use the
MC_Stop instruction or execute another motion instruction. If you specify a Torque (Target Torque) of 0,
the axis will not move but the axis status will indicate that it is moving.
Precautions for Correct UsePrecautions for Correct Use
• To be safe, always set a velocity limit value for torque control.
• You cannot use single-axis torque control for an NX-series Pulse Output Unit.
The MC Function Module uses the Torque Control Mode of the Servo Drive. The Servo Drive receives
the torque command value from the MC Function Module in the torque control loop and to control the
torque. You can specify the velocity limit value for the Servo Drive in the Velocity (Velocity Limit) input
variable to the motion control instruction. You can use this to limit high-speed revolution of the motor
when the load on the motor is low in Torque Control Mode.
For details, refer to the MC_TorqueControl instruction in the NJ/NX-series Motion Control Instructions
Reference Manual (Cat. No. W508).
Example 1: Direction Designation =
Positive Direction
Example 2: Direction Designation =
Negative Direction
Torque
Torque
TorqueRamp
TorqueRamp
Time
Torque
Time
Torque

 Loading...
Loading...







