6-7
6 Motion Control Programming
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
6-3 State Transitions
6
6-3-2 Axis States
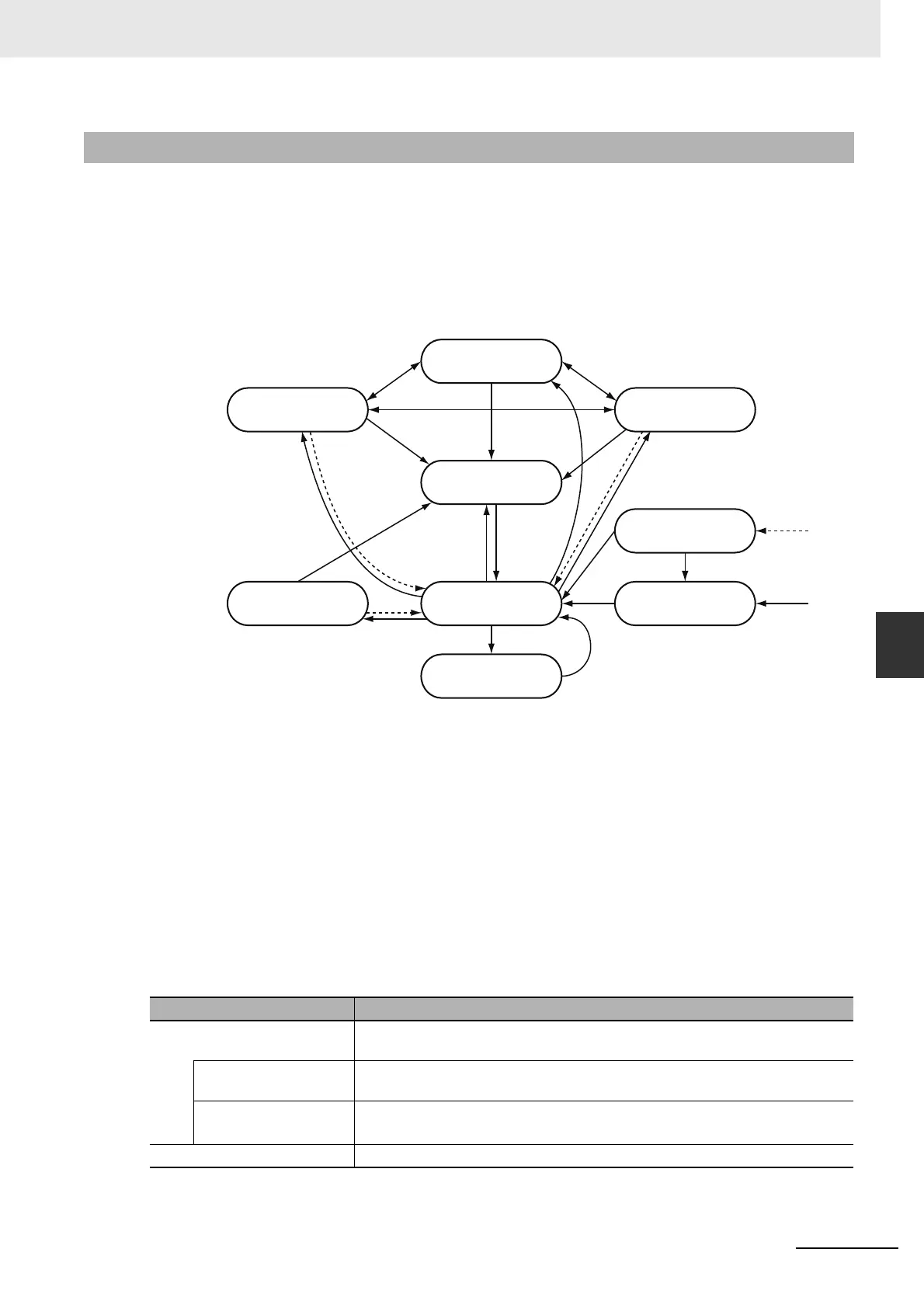
The operation of an axis when motion control instructions are executed for it is shown in the following
figure. Motion control instructions are executed in sequence and axes enter one of the states listed in
the following table.
*1 Transition into this state occurs when there is an axis error in any state except for Coordinated Motion state.
*2 Transition into this state occurs when there are no axis errors and the Status output to the MC_Power instruc-
tion is FALSE. (The Servo is OFF.)
*3 Transition into this state occurs if an error is reset with the MC_Reset or ResetMCError instruction when the
Servo is OFF.
*4 Transition into this state occurs if an error is reset with the MC_Reset or ResetMCError instruction when the
Servo is ON.
*5 Transition into this state occurs when the Enable input to the MC_Power instruction changes to TRUE and the
Status (Servo ON) output from the MC_Power instruction changes to TRUE. (The Servo is ON.)
*6 Transition into this state occurs when the Done output from the MC_Stop instruction is TRUE and the Execute
input to the MC_Stop instruction changes to FALSE.
*7 Transition into the Deceleration Stopping state occurs when the MC_ResetFollowingError instruction is exe-
cuted.
*8 The Continuous Motion state exists from when velocity control is set for the MoveMode input variable of the
MC_MoveFeed instruction until a trigger input is detected.
6-3-2 Axis States
State name Definition
Servo OFF In this state, the Servo is OFF for the axis. When this state is moved to, the
buffered status for multi-execution of instructions is cleared.
Axis Disabled In this state, the Servo is OFF for the axis, the axis is stopped, and execution
preparations are completed.
Error Deceleration
Stopping
*1
In this state, the Servo is OFF for the axis, the axis is stopped, and an axis error
has occurred.
Servo ON In this state, the Servo is ON for the axis.
*6
*3
*1
*2
*5
MC_Stop
*4
MC_Home
MC_HomeWithParameter
MC_Move
MC_MoveAbsolute
MC_MoveRelative
MC_MoveFeed
MC_MoveZeroPosition
MC_GearOut
MC_CamOut
MC_SyncMoveVelocity
MC_MoveVelocity
MC_TorqueControl
MC_MoveJog
MC_ImmediateStop
*7: MC_ResetFollowingError
*7
*8
Axis Disabled
Disabled
Error Deceleration Stopping
ErrorStop
Continuous Motion
Continuous
Coordinated Motion
Coordinated
Standstill
Standstill
Deceleration Stopping
Stopping
Homing
Homing
Discrete Motion
Discrete
MC_MoveLink (slave axis)
MC_CombineAxes (slave axis)
MC_CamIn (slave axis)
MC_GearInPos (slave axis)
MC_GearIn (slave axis)
Synchronized Motion
Synchronized