5 Motion Control Parameters
5-24
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
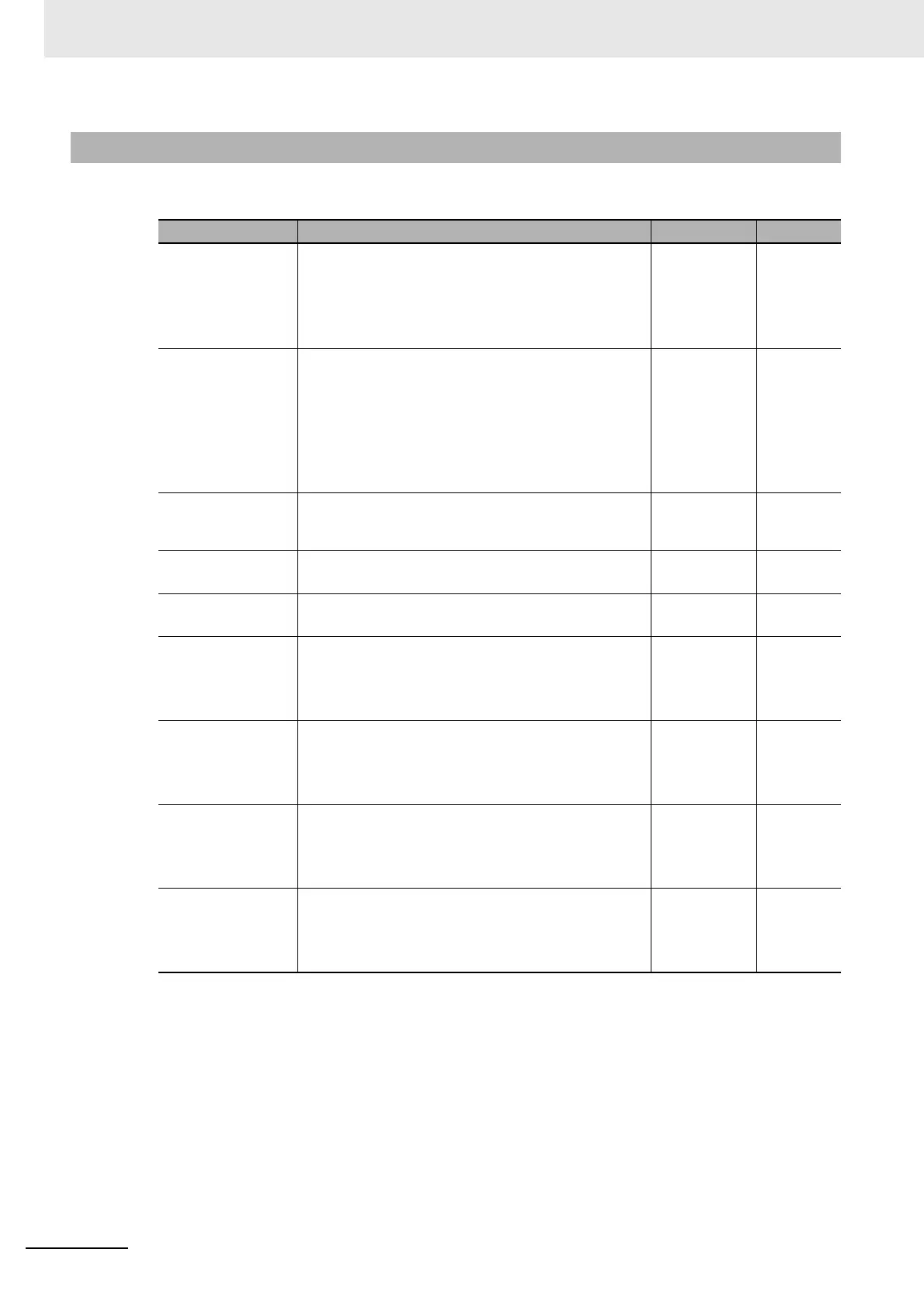
These parameters are used to set the stopping methods and torque limits to use when the input sig-
nals are enabled.
*1 If Positive Torque Limit Value (60E0 hex) and Negative Torque Limit Value (60E1 hex) are mapped as PDOs,
the set values of these parameters are sent with EtherCAT process data communications. If a torque limit is
enabled with the MC_SetTorqueLimit instruction, the value that is specified with the input variable to the
instruction is sent.
*2 A CPU Unit with unit version 1.05 or later and Sysmac Studio version 1.06 or higher are required to use this
parameter. You cannot reverse the logic for a CPU Unit with a unit version of 1.04 or earlier. This parameter is
set for devices, such as NX-series Digital Input Units, for which the logic of the input signals cannot be set. For
devices, such as OMRON 1S-series Servo Drives, for which you can set the input signal logic, set this param-
eter to not reverse the signal.
*3 If you assign an NX-series Pulse Output Unit to an axis, the default is TRUE.
5-2-5 Other Operation Settings
Parameter name Function Setting range Default
Immediate Stop
Input Stop Method
Set the stopping method in the MC Function Module
when the immediate stop input is enabled.
0: Immediate stop
2: Immediate stop and error reset
3: Immediate stop and Servo OFF
0, 2, or 3 0
Limit Input Stop
Method
Set the stopping method in the MC Function Module
when the positive limit input or negative limit input is
enabled.
0: Immediate stop
1: Deceleration stop
2: Immediate stop and error reset
3: Immediate stop and Servo OFF
0 to 3 0
Drive Error Reset
Monitoring Time
Set the monitor time for a drive error reset. (Unit: ms)
After the monitor time has elapsed, reset processing
will end even if the drive error is not yet reset.
1 to 1,000 200
Maximum Positive
Torque Limit
Set the maximum value of the positive torque limit.
*1
(Unit: %)
0.0 to 1000.0 300.0
Maximum Negative
Torque Limit
Set the maximum value of the negative torque limit.
*1
(Unit: %)
0.0 to 1000.0 300.0
Immediate Stop
Input Logic Inver-
sion
*2
Set whether to reverse the logic of the immediate stop
input signal.
FALSE: Do not reverse.
TRUE: Reverse.
FALSE or
TRUE
FALSE
*3
Positive Limit Input
Logic Inversion
*2
Set whether to reverse the logic of the positive limit
input signal.
FALSE: Do not reverse.
TRUE: Reverse.
FALSE or
TRUE
FALSE
*3
Negative Limit Input
Logic Inversion
*2
Set whether to reverse the logic of the negative limit
input signal.
FALSE: Do not reverse.
TRUE: Reverse.
FALSE or
TRUE
FALSE
*3
Home Proximity
Input Logic Inver-
sion
*2
Set whether to reverse the logic of the home proximity
input signal.
FALSE: Do not reverse.
TRUE: Reverse.
FALSE or
TRUE
FALSE

 Loading...
Loading...







