9 Motion Control Functions
9-24
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
This function performs positioning using a trapezoidal curve while synchronizing the specified slave
axis to the specified master axis. This is a type of electronic cam, but it does not use cam tables created
in the Cam Editor. Operation starts when the MC_MoveLink (Synchronous Positioning) instruction is
executed. Use the MC_Stop instruction to stop the axes in motion. Operation is performed for the Slave
(Slave Axis) and the following are set: Master (Master Axis), MasterDistance (Master Axis Travel Dis-
tance), MasterDistanceInACC (Master Distance In Acceleration), MasterDistanceInDEC (Master Dis-
tance In Deceleration), SlaveDistance (Slave Axis Travel Distance), and MasterStartDistance (Master
Following Distance). The command position or actual position can be specified for the master axis. You
can specify one of the following as the start condition for synchronous operation: start of instruction,
when trigger is detected, or when master axis reaches the master following distance.
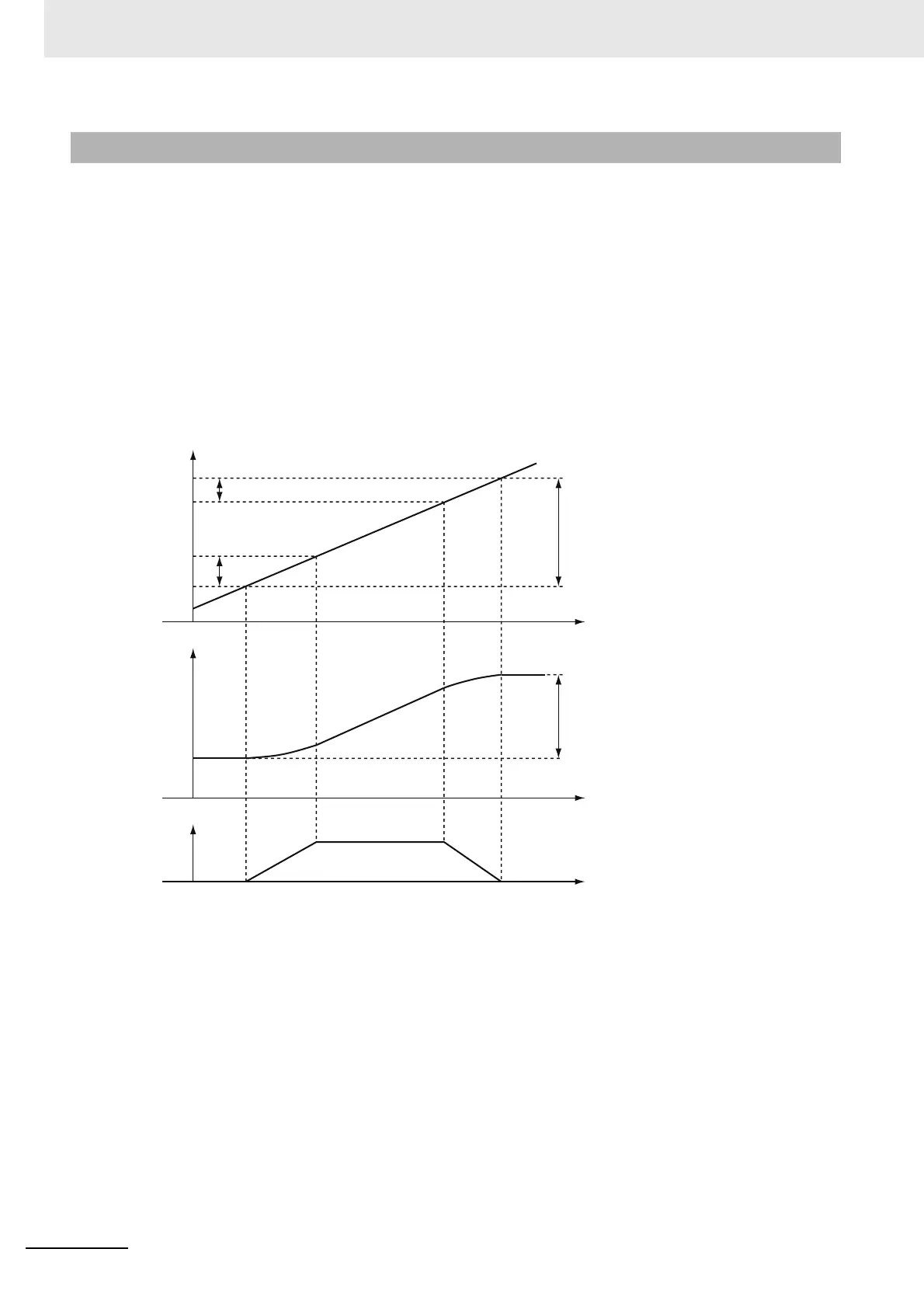
The velocity and position of the slave axis are determined by the ratio of the travel distances of the
master axis and the slave axis as shown in the following figure. The sync start position shown in the fol-
lowing figure represents the position where the sync start condition is met.
For details on synchronous positioning, refer to the MC_MoveLink (Synchronous Positioning) and
MC_Stop instructions in the NJ/NX-series Motion Control Instructions Reference Manual (Cat. No.
W508).
9-2-6 Synchronous Positioning
MasterDistanceInDEC
MasterDistanceInACC
MasterDistance
SlaveDistance
Time
Time
Time
Slave axis velocity
Slave axis position
Master
Following
Distance
Master axis position

 Loading...
Loading...







