2-3
2 Motion Control Configuration and Principles
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
2-2 Motion Control Configuration
2
2-2 Motion Control Configuration
A control system built with Servo Drives generally controls motor operation with a semi-closed loop.
The semi-closed loop uses an encoder attached to the motor to detect the amount of rotation that has
been performed by the motor in response to the command value. This is provided as feedback of the
machine’s travel distance. The following error between the command value and actual motor rotation is
calculated and control is performed to bring the following error to zero.
In a machine configuration that uses the MC Function Module, no feedback information is provided for
the commands from the user program in the CPU Unit. A feedback system is built into the Servo Drive.
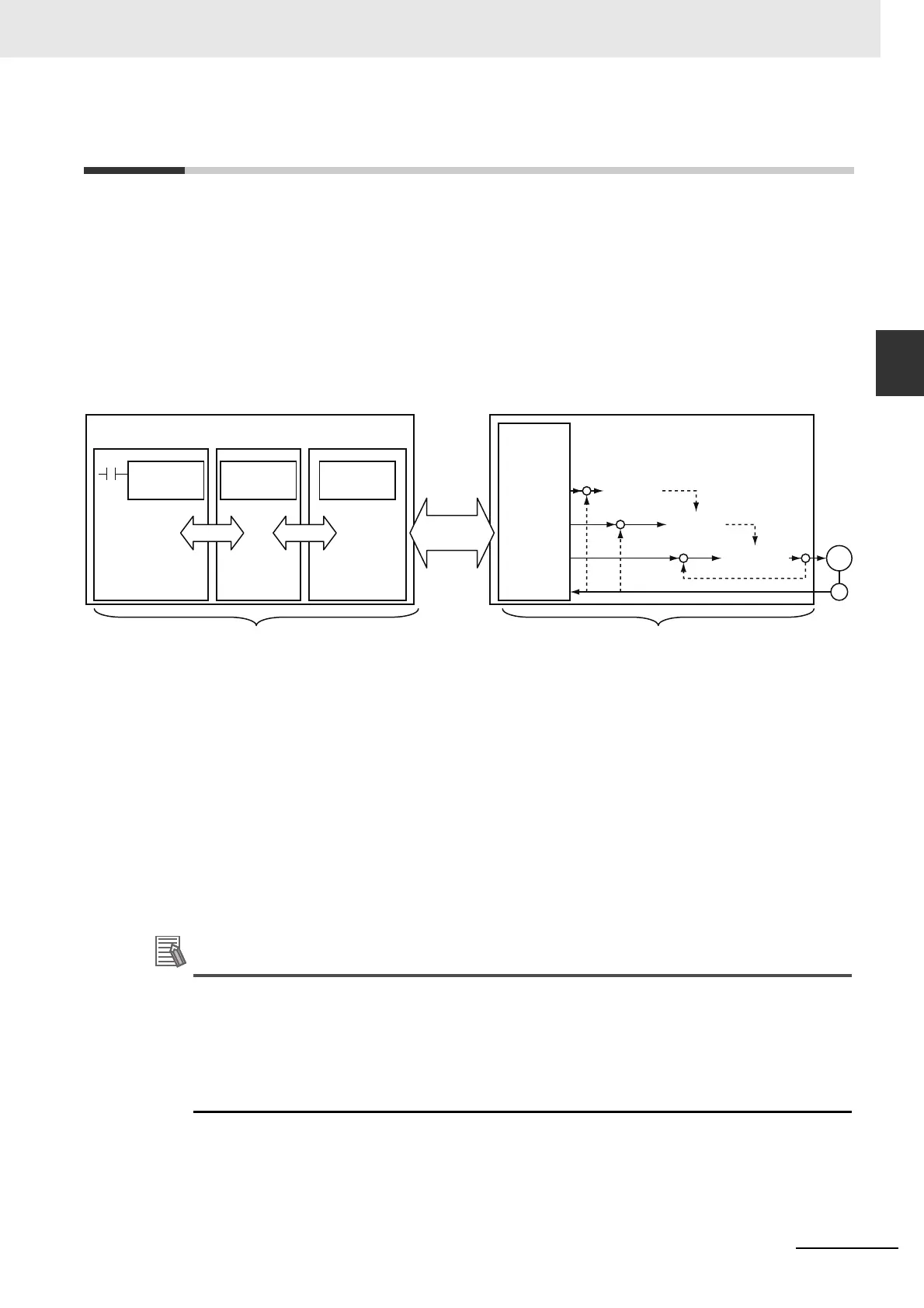
Configuration on EtherCAT Network
• When motion control instructions are executed in the user program, the MC Function Module inter-
prets the resulting commands.
• The MC Function Module then performs motion control processing at a fixed period based on the
results of the command interpretation. It generates command values to send to the Servo Drive. The
following command values are generated: target position, target velocity, and target torque.
• The command values are sent by using PDO communications during each process data communica-
tions cycle of EtherCAT communications.
• The Servo Drive performs position loop control, velocity loop control, and torque loop control based
on the command values received during each process data communications cycle of EtherCAT com-
munications.
• The encoder’s current value and the Servo Drive status are sent to the CPU Unit during each process
data communications cycle to use EtherCAT communications.
• Motion control processing and process data communications in EtherCAT communications
are performed during the same time period.
• The MC Function Module controls the Servo Drive, which contains the position control loop,
velocity control loop, and torque control loop.
• Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for information
on the configuration to use the NX-series Position Interface Units.
NX701/NJ-series CPU Unit
A feedback system is not configured.
A feedback system is configured.
Servo Drive
User program MC Function
Module
EtherCAT Master
Function Module
EtherCAT
communications
Communications
processing
Command
interpretation
Data processing
Motion
control
instruction
Communica-
tions
processing
Status
Position
control
Velocity
control
Torque
control
Command
interpretation
M
E

 Loading...
Loading...







