9 Motion Control Functions
9-6
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
For details, refer to the MC_MoveFeed (Interrupt Feeding) instruction in the NJ/NX-series Motion Con-
trol Instructions Reference Manual (Cat. No. W508).
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for the differences when
you use NX-series Pulse Output Units.
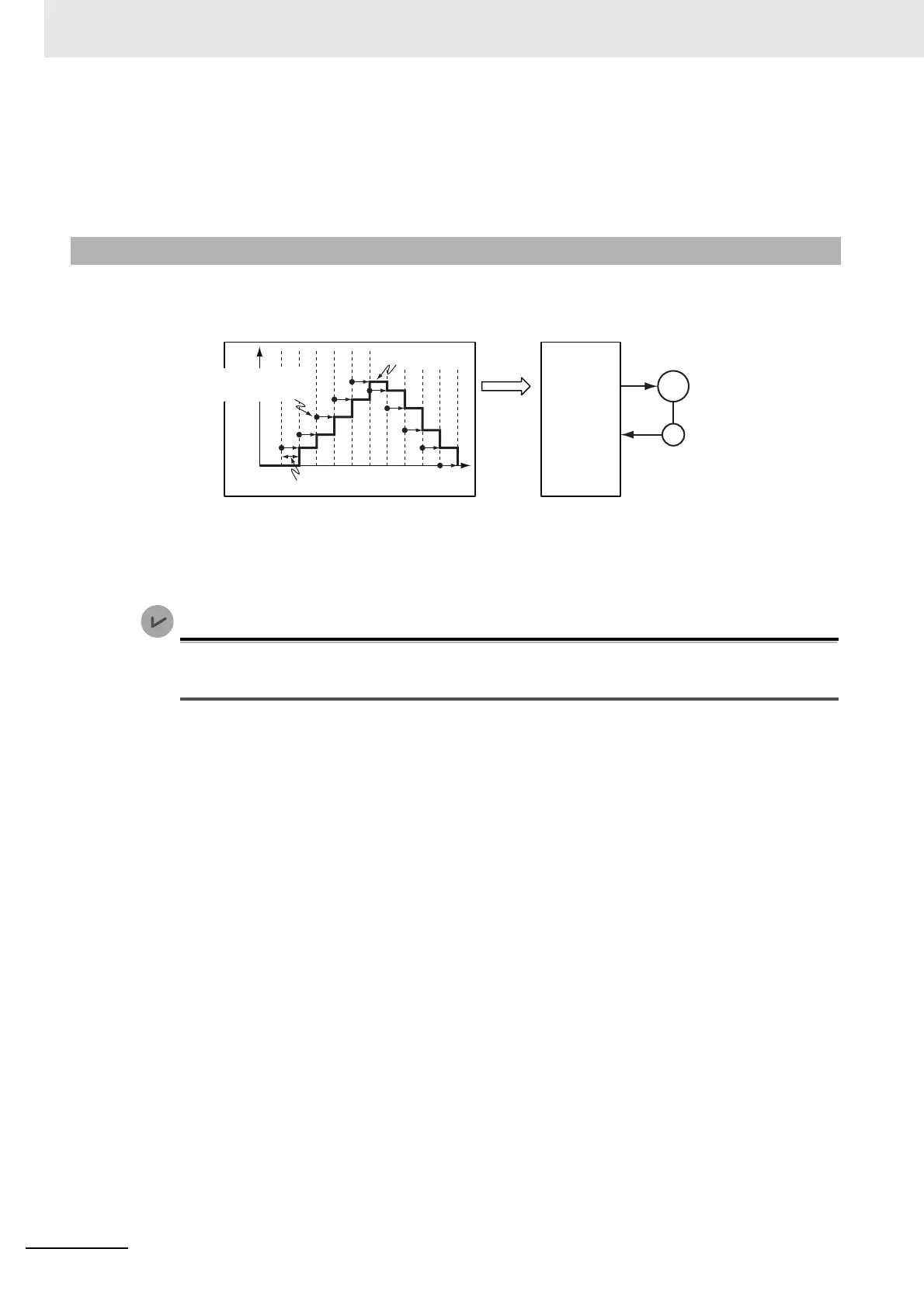
Cyclic synchronous positioning is used to output a target position to a specified axis each control period
in the primary periodic task or a periodic task. The target position is specified as an absolute position.
You can use it to move in a specific path that you create.
For details, refer to the MC_SyncMoveAbsolute (Cyclic Synchronous Absolute Positioning) instruction
in the NJ/NX-series Motion Control Instructions Reference Manual (Cat. No. W508).
A CPU Unit with unit version 1.03 or later and Sysmac Studio version 1.04 or higher are required
to use cyclic synchronous positioning.
9-1-5 Cyclic Synchronous Positioning
M
E
Command
position
Time
Task period
Command position
Position
Servo
Drive
Target positions (black dots)
specified with the input
parameters

 Loading...
Loading...







