10-71
10 Sample Programming
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
10-2 Basic Programming
Samples
10
10-2-15 Changing the Actual Position during Velocity Control
This sample changes the absolute values of the command current position and the actual current posi-
tion for an axis in velocity control.
Precautions for Correct UsePrecautions for Correct Use
• When you use the MC_SetPosition instruction for an axis in motion, the travel distance
between execution of the instruction and changing the actual position will remain as error.
• Home will become undefined when the MC_Set Position instruction is executed.
10-2-15 Changing the Actual Position during Velocity Control
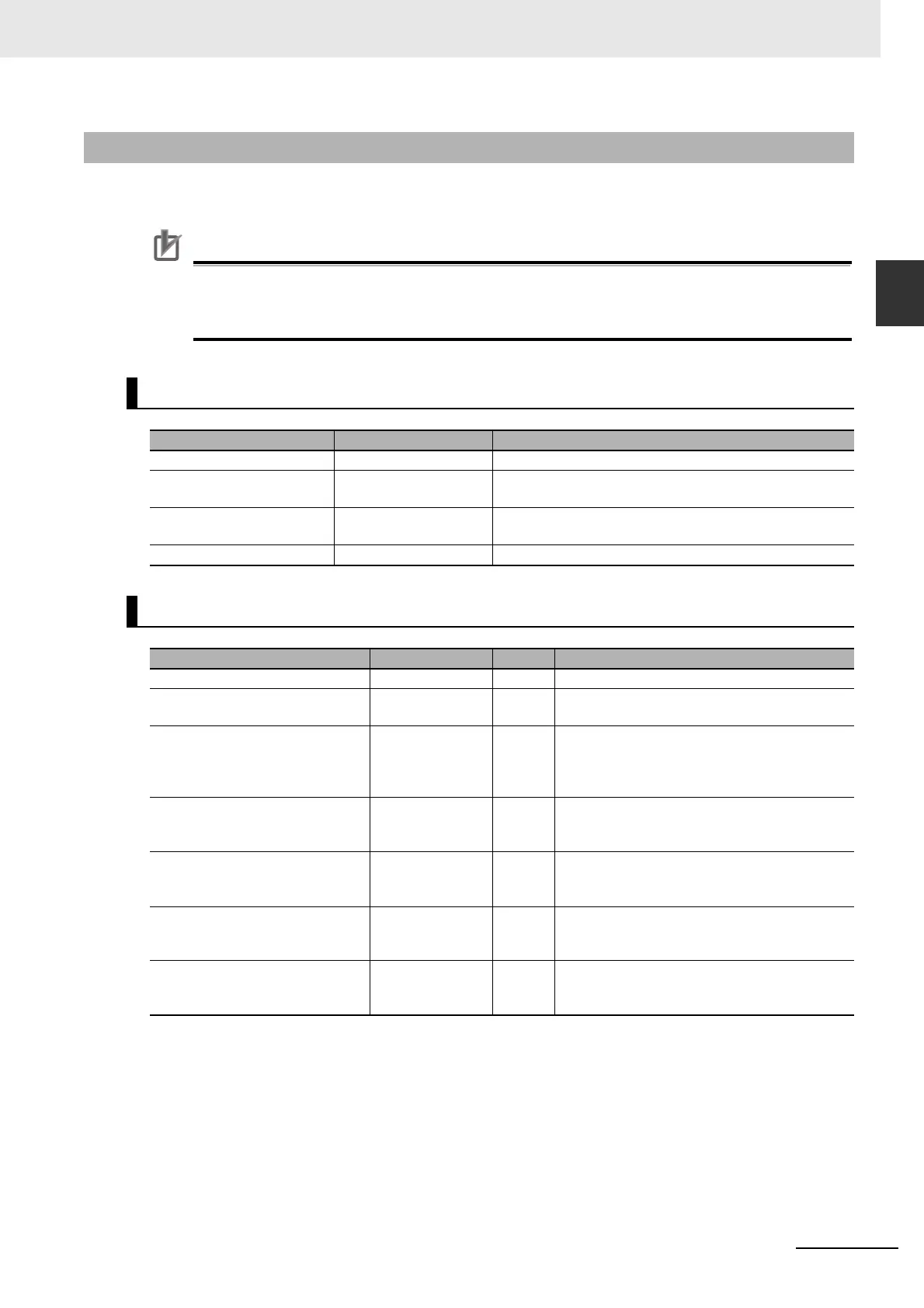
Axis Parameter Settings
Parameter name Setting Description
Count Mode Rotary Mode Rotary Mode is set as the count mode for the position.
Modulo Maximum Position
Setting Value
360 The Modulo Maximum Position is set to 360.
Modulo Minimum Position
Setting Value
0 The Modulo Minimum Position is set to 0.
Homing Method Zero position preset A zero position preset is performed to define home.
Main Variables Used in the Programming Samples
Variable name Data type Default Comment
MC_Axis000 _sAXIS_REF --- This is the Axis Variable for axis 0.
MC_Axis000.MFaultLvl.Active BOOL FALSE TRUE when there is a minor fault level error
for axis 0.
Pwr_Status BOOL FALSE This variable is assigned to the Status output
variable from the PWR instance of the
MC_Power instruction. It is TRUE when the
Servo is ON.
StartSetPos BOOL FALSE This variable gives the status of the external
button that is used to change the actual posi-
tion.
StartPg BOOL FALSE When StartPg is TRUE, the Servo is turned
ON if EtherCAT process data communications
are active and normal.
Vel_Ex BOOL FALSE This variable is used to execute the
MC_MoveVelocity (Velocity Control) instruc-
tion. It is used in ST programming.
SetPos_Ex BOOL FALSE This variable is used to execute the MC_Set-
Position instruction. It is used in ST program-
ming.