5-29
5 Motion Control Parameters
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
5-2 Axis Parameters
5
5-2-10 Axis Parameter Setting Example
*1 These parameters are for homing operation. Refer to Section 8 Homing for details.
*2 You cannot map the Z-phase input to a PDO for an OMRON G5-series Linear Motor Type Servo Drive. There-
fore, if you set the Homing Method to the No home proximity input/holding home input, which can use a Z-
phase input mapped to a PDO, do not select the Z-phase input for the home input signal.
*3 This setting can be used for an OMRON 1S-series Servo Drive or G5-series Servo Drive. The input allocated
to latch 1 for the Servo Drive is used as the external home input. In the default setting of the OMRON 1S-series
Servo Drives or G5-series Servo Drives, the external latch input 1 is allocated to latch 1.
For details, refer to the AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT Communications
User’s Manual (Cat. No. I586), AC Servomotors/Servo Drives G5-series with Built-in EtherCAT Communica-
tions User’s Manual (Cat. No. I576) or the AC Servomotors/Servo Drives G5-series with Built-in EtherCAT
Communications Linear Motor Type User’s Manual (Cat. No. I577)
Refer to the NX-series Position Interface Units User’s Manual (Cat. No. W524) for information on using the NX-
series Position Interface Units.
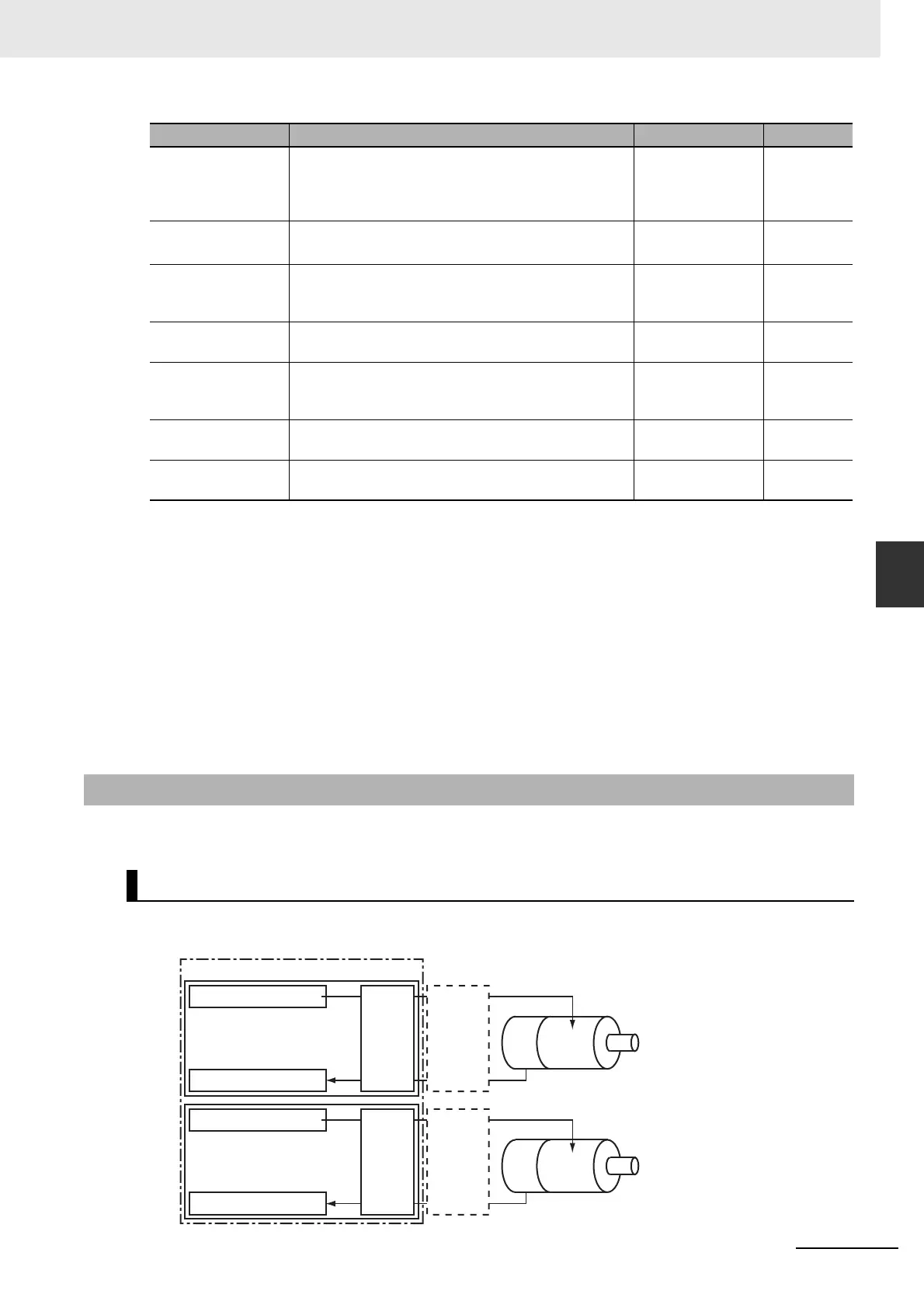
This section provides examples of axis parameter settings related to positioning.
The following example is for a device that performs single-axis positioning separately for each of two
axes.
Homing Decelera-
tion
Set the deceleration rate for homing. If the homing
deceleration is set to 0, the homing approach velocity
or other target velocity is used without any decelera-
tion. (Unit: command units/s
2
)
Non-negative long
reals
0
Homing Jerk Set the jerk for homing. Set 0 for no jerk. (Unit: com-
mand units/s
3
)
Non-negative long
reals
0
Home Input Mask
Distance
Set the home input mask distance when you set the
Homing Operation Mode to a proximity reverse
turn/home input mask distance. (Unit: command units)
Non-negative long
reals
10,000
Home Offset Preset the actual position for the value that is set after
homing. (Unit: command units)
Long reals 0
Homing Holding
Time
Set the holding time when you set the Homing Opera-
tion Mode to a proximity reverse turn/holding time.
(Unit: ms)
0 to 10,000 100
Homing Compensa-
tion Value
Set the homing compensation value that is applied
after the home is defined. (Unit: command units)
Long reals 0
Homing Compensa-
tion Velocity
Set the velocity to use for homing compensation.
(Unit: command units/s).
Positive long reals 1,000
5-2-10 Axis Parameter Setting Example
Single-axis Positioning
Parameter name Function Setting range Default
MC Function Module
Command position
Axis 1
Actual position
Axis 1: Servo axis
Axis 2: Servo axis
Encoder
Encoder
Servo-
motor
Servo-
motor
Gear
ratio
Gear
ratio
Axis 1
Servo
Drive
Axis 2
Servo
Drive
Command position
Axis 2
Actual position

 Loading...
Loading...







