8 Homing
8-2
NJ/NX-series CPU Unit Motion Control User’s Manual (W507)
8-1 Outline
This section describes the operations that are performed when the MC Function Module is combined
with an OMRON G5-series Servo Drive.
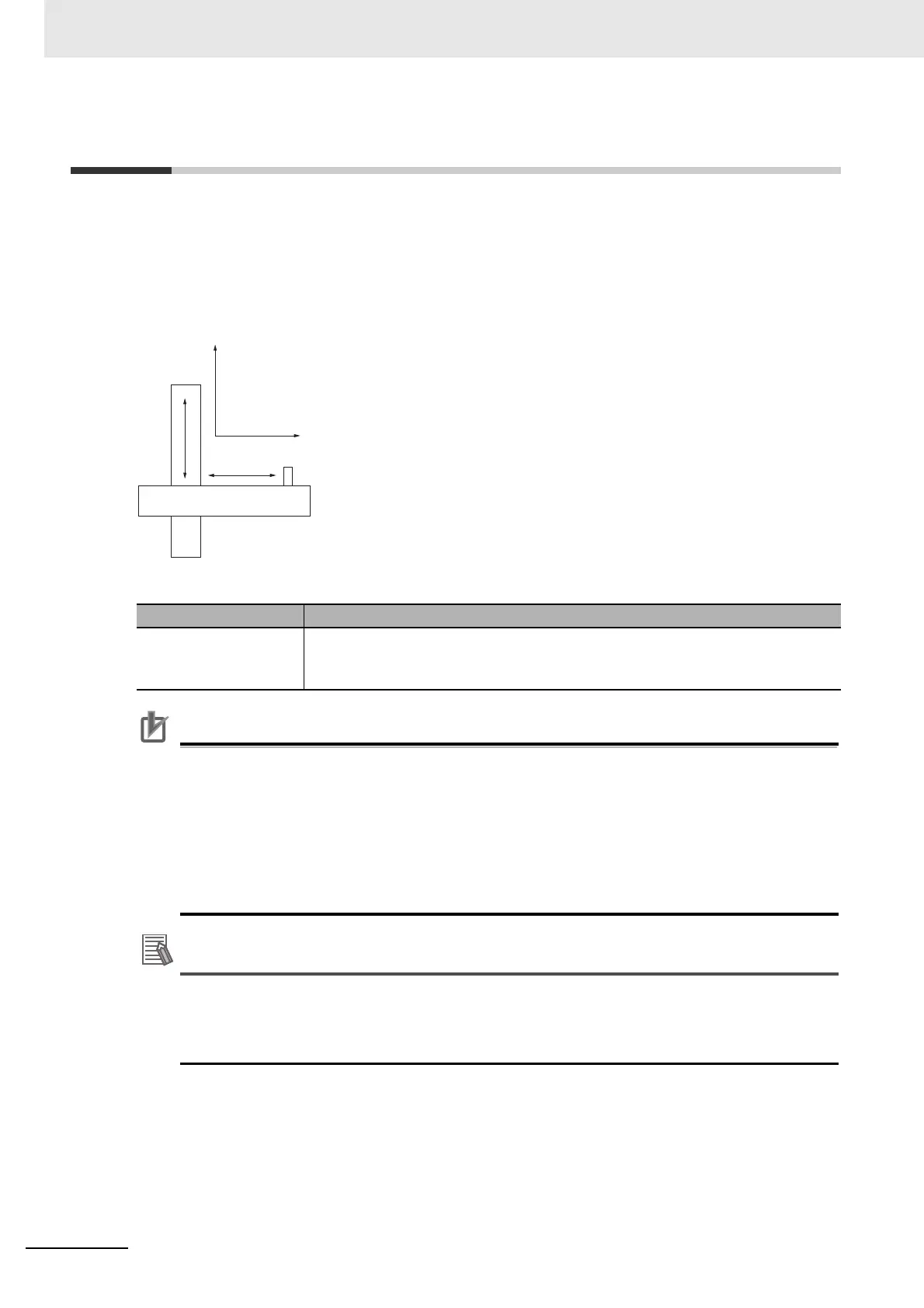
To perform positioning to absolute positions in a positioning system, you must first define the home. For
example, if you want to perform positioning to the position (axis 1, axis 2) = (100 mm, 200 mm) in the
XY plane shown below, you must define the position of home (0,0). The process of defining home is
called homing.
In the MC Function Module, use the motion control instruction MC_Home or MC_HomeWithParameter
to define home.
Precautions for Correct UsePrecautions for Correct Use
• The defined home is lost in the following situations.
• When MC_SetPosition is executed.
• When an overflow or underflow occurs in Linear Mode.
• When homing is started.
• The control state of EtherCAT communications is not Operational state.
• Some of the homing functions are restricted for the NX-series Position Interface Units. Refer to
the NX-series Position Interface Units User’s Manual (Cat. No. W524) for details.
If an OMRON 1S-series Servomotor or G5-series Servomotor with an absolute encoder is used,
or if an OMRON G5-series Linear Motor Type Servomotor/Servo Drive with built-in EtherCAT
communications is used with an absolute external scale, home is defined when the Enable input
variable to the MC_Power instruction changes to TRUE.
Name Description
Homing Home is defined by actually moving the motor and using the limit sensors, home prox-
imity sensor, and home input signal to determine the position of home.
Use a proximity sensor or the encoder’s Z phase signal as the home input signal.
(100,200)
(0,0)
Axis 1
Axis 2